Digitaaliset laitteet: varvastossut, vertailulaitteet ja rekisterit
 Digitaaliset laitteet rakentuvat loogisille elementeille, joten ne noudattavat loogisen algebran lakeja. Digitaalitekniikan peruslaitteet logiikkalaitteiden ohella ovat varvastossuja.
Digitaaliset laitteet rakentuvat loogisille elementeille, joten ne noudattavat loogisen algebran lakeja. Digitaalitekniikan peruslaitteet logiikkalaitteiden ohella ovat varvastossuja.
Trigger (englanniksi trigger - trigger) - elektroninen laite, jolla on kaksi vakaata tilaa ja joka voi hypätä tilasta toiseen ulkoisen impulssin vaikutuksesta.
Triggereitä tai tarkemmin sanottuna laukaisujärjestelmiä kutsutaan suureksi elektronisten laitteiden luokaksi, joilla on kyky pysyä yhdessä kahdesta vakaasta tilasta pitkään ja vaihtaa niitä ulkoisten signaalien vaikutuksesta. Jokainen laukaisutila tunnistetaan helposti lähtöjännitteen arvosta.
Jokainen liipaisutila vastaa tiettyä (korkeaa tai matalaa) lähtöjännitetasoa:
1) liipaisin on asetettu yhteen tilaan — tasoon «1».
2) flip-flop nollataan — taso «0» lähdössä.
Vakiotila pysyy niin kauan kuin halutaan ja sitä voidaan muuttaa ulkoisella pulssilla tai katkaisemalla syöttöjännite. Che.flip-flop on perusmuistielementti, joka pystyy tallentamaan pienimmän informaatioyksikön (yhden bitin) «0» tai «1».
Varvastossut voidaan rakentaa erillisille elementeille, logiikkaelementeille, integroidulle piirille tai osana integroitua piiriä.
Varvastossujen päätyyppejä ovat: RS-, D-, T- ja JK-räpylät... Lisäksi varvastossut jaetaan asynkronisiin ja synkronisiin. Asynkronisessa toiminnassa vaihto tilasta toiseen tapahtuu suoraan signaalin saapuessa informaatiotuloon. Datasisääntulojen lisäksi synkronoiduissa flip-flopeissa on kellotulo. Niiden kytkentä tapahtuu vain sallivan kellopulssin läsnä ollessa.
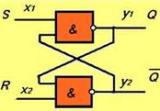
RS-liipaisussa on vähintään kaksi tuloa: S (set — set) — liipaisin on asetettu tilaan «1» ja R (reset) — liipaisin palautetaan tilaan «0». (Kuva 1).
Tulon C läsnäollessa flip-flop on synkroninen - kiikun vaihto (lähdön tilan muutos) voi tapahtua vain silloin, kun synkronointi (synkronointi) pulssi saapuu tuloon C.

Kuva 1 – RS-kiikun perinteinen graafinen esitys ja päätelmien tarkoitus a) asynkroninen, b) synkroninen
Suoran lähdön lisäksi flip-flopissa voi olla myös käänteinen lähtö, jonka signaali on vastakkainen.
Taulukossa 1 on esitetty tilat, jotka kiikku voi omaksua käytön aikana. Taulukossa näkyvät tulosignaalien S ja R arvot tietyllä ajanhetkellä tn ja kiikun tila (suoran lähdön) seuraavalla ajanhetkellä tn + 1 seuraavan saapumisen jälkeen. pulssit. Uuteen liipaisutilaan vaikuttaa myös Q n:n edellinen tila.
Che.jos on tarpeen kirjoittaa triggeriin «1» — annamme pulssin S-tuloon, jos «0» — lähetämme pulssin R-tuloon.
Yhdistelmä S = 1, R = 1 on kielletty yhdistelmä, koska on mahdotonta ennustaa, mikä tila lähtöön muodostuu.
Taulukko 1 - Synkronisen RS-kiikun tilataulukko

Flip-flopin toiminta näkyy myös ajoituskaavioiden avulla (kuva 2).
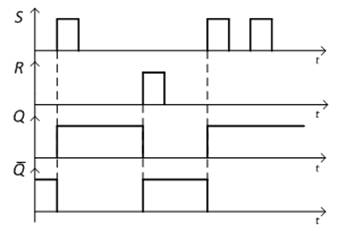
Kuva 2 — Asynkronisen RS-kiikun ajoituskaaviot
D-triggerissä (englanniksi viive — delay) on yksi tietotulo ja kello (synkronointi) sisääntulo (kuva 3).
D-kiikku tallentaa ja tallentaa lähtöön Q signaalin, joka oli datatulossa D kellopulssin C saapumishetkellä. Kiikku tallentaa informaation, joka on kirjoitettu kun C = 1.
Taulukko 2 - Taulukko D-flip-flopin tiloista

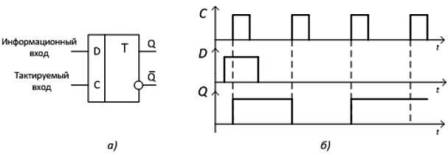
Kuva 3 — D-liipaisin: a) perinteinen graafinen esitys, b) toiminnan ajoituskaaviot
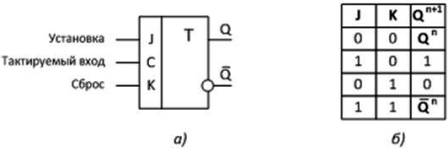
T-liipaisuilla (englannin kielestä tumble — kaatuminen, kuperkeikka), joita kutsutaan myös laskentaflip-flopeiksi, on yksi tietotulo T. Jokainen T-sisääntulon (laskentatulo) pulssi (pulssin vaimeneminen) kytkee liipaisimen vastakkaiseen tilaan.
Kuvassa 4 on esitetty T-liipaisinsymboliikka (a) ja toiminnan ajoituskaaviot (b).
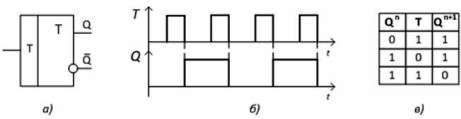
Kuva 4-T-flip-flop a) perinteinen graafinen merkintä, b) toiminnan ajoituskaaviot c) tilataulukko
JK-liipaisussa (englannin sanasta jump — jump, keer — hold) on kaksi datasisääntuloa J ja K sekä kellotulo C. Nastojen J ja K osoitus on samanlainen kuin nastojen R ja S osoitus, mutta laukaisussa on ei kiellettyjä yhdistelmiä. Jos J = K = 1, se muuttaa tilansa päinvastaiseksi (kuva 5).
Tulojen asianmukaisella kytkennällä liipaisin voi suorittaa RS-, D-, T-liipaisujen toimintoja, ts. on yleinen laukaisin.
Kuva 5 -JK -flip-flop a) tavanomainen -graafinen merkintä, b) lyhennetty tilataulukko
Comparator (vertaa - vertaa) - laite, joka vertaa kahta jännitettä - tulo Uin referenssillä Uref. Referenssijännite on vakiojännite, jolla on positiivinen tai negatiivinen napaisuus, tulojännite muuttuu ajan myötä. Yksinkertaisin operaatiovahvistimeen perustuva vertailupiiri on esitetty kuvassa 6, a. Jos Uin Uop lähdössä U — us (kuva 6, b).
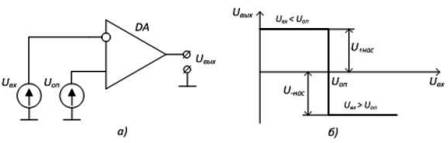
Kuva 6 – Op-amp-vertailija: a) yksinkertaisin kaavio b) suorituskykyominaisuudet
Positiivisen palautteen vertailijaa kutsutaan Schmitt-laukaisuksi. Jos vertailija vaihtaa «1»:stä «0»:aan ja päinvastoin samalla jännitteellä, niin Schmitt-laukaisu - eri jännitteillä. Referenssijännite muodostaa PIC-piirin R1R2, tulosignaali syötetään operaatiovahvistimen invertoivaan tuloon. Kuva 7, b, esittää Schmitt-liipaisimen siirtokäyrän.
Negatiivinen jännite OS:n varastotulossa Uout = U + sat. Tämä tarkoittaa, että positiivinen jännite vaikuttaa ei-invertoivaan tuloon. Tulojännitteen kasvaessa virta Uin > Uneinv. (Uav — trigger) komparaattori menee tilaan Uout = U -sat. Ei-invertoivaan tuloon syötetään negatiivinen jännite. Vastaavasti tulojännitteen pienentyessä tällä hetkellä Uin <Uneinv. (Uav — trigger) komparaattori menee tilaan Uout = U + sat.
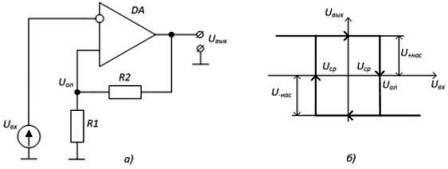
Kuva 7 – Operaatiovahvistimen Schmitt-toiminta: a) yksinkertaisin kaavio b) suorituskykyominaisuudet
Esimerkki. Kuvassa 8 on kaavio rele-kontaktorista sähkömoottorin ohjaamiseksi, jolloin se voi käynnistyä, pysähtyä ja peruuttaa.
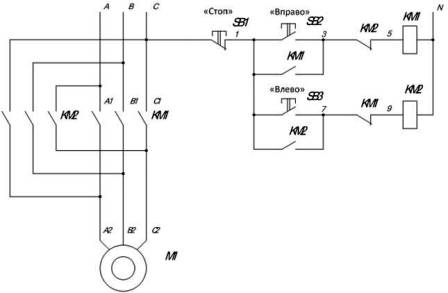
Kuva 8 — Relekontaktorin moottorin ohjauskaavio
Sähkömoottorin kommutointi suoritetaan magneettisilla käynnistimillä KM1, KM2. Vapaasti suljetut koskettimet KM1, KM2 estävät magneettikäynnistimien samanaikaisen käytön. Vapaasti avoimet koskettimet KM1, KM2 mahdollistavat painikkeiden SB2 ja SB3 itselukituksen.
Toimintavarmuuden parantamiseksi on tarpeen korvata rele-kontaktori ohjauspiirit ja tehopiirit kosketuksettomalla järjestelmällä, jossa käytetään puolijohdelaitteita ja -laitteita.
Kuva 9 esittää kontaktittoman moottorin ohjauspiirin.
Magneettisten käynnistimien tehokoskettimet korvattiin optosimistoreilla: KM1-VS1-VS3, KM2-VS4-VS6. Optosistorien käyttö mahdollistaa pienvirran ohjauspiirin eristämisen tehokkaasta syöttöpiiristä.
Liipaisimet tarjoavat itselukkiutuvat painikkeet SB2, SB3. Logiikkaelementit JA varmistavat vain yhden magneettikäynnistimen aktivoinnin samanaikaisesti.
Kun transistori VT1 avautuu, virta kulkee ensimmäisen optosimistoriryhmän VS1-VS3 LEDien läpi varmistaen siten virran kulkemisen moottorin käämien läpi. Transistorin VT2 aukeaminen syöttää toisen ryhmän optosimistorit VS4 -VS6, joka varmistaa sähkömoottorin pyörimisen toiseen suuntaan.
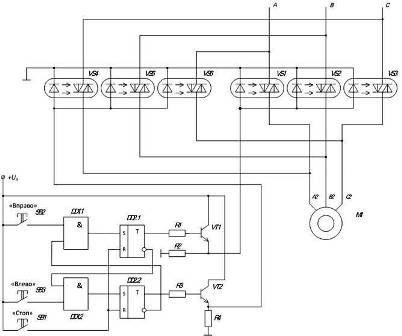
Kuva 9 — Kontaktiton moottorin ohjauspiiri
Rekisteri - elektroninen laite, joka on suunniteltu moninumeroisten binäärilukujen lyhytaikaiseen tallentamiseen ja muuntamiseen. Rekisteri koostuu kiikkuista, joiden lukumäärä määrittää kuinka monta binääriluvun bittiä rekisteri voi tallentaa — rekisterin koon (kuva 10, a). Logiikkaelementeillä voidaan organisoida laukaisujen toimintaa.
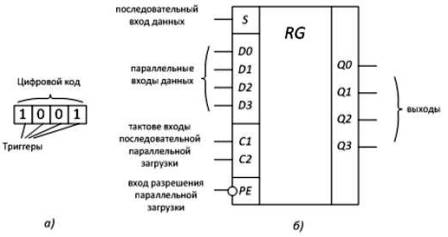
Kuva 10 — Rekisteri: a) yleinen esitys, b) tavanomainen graafinen merkintä
Tietojen syöttö- ja tulostustavan mukaan rekisterit jaetaan rinnakkaisiin ja sarjamuotoisiin.
Sekvenssirekisterissä kiikut on kytketty sarjaan, eli edellisen kiikun lähdöt välittävät tietoa seuraavan kiikun tuloihin. Flip-flop-kellon tulot C on kytketty rinnan. Tällaisessa rekisterissä on yksi tietotulo ja ohjaustulo - kellotulo C.
Rinnakkaisrekisteri kirjoittaa samanaikaisesti kiikkuihin, joille on neljä datasisääntuloa.
Kuva 10 esittää nelibittisen rinnakkaissarjarekisterin UGO:n ja pin-allokoinnin.