Anti-aliasointisuodattimet ja jännitteen stabilisaattorit
 Tasoitussuodattimet on suunniteltu vähentämään tasasuuntaista jännitteen aaltoilua. Aaltoilun tasoitus lasketaan tasoituskertoimella q.
Tasoitussuodattimet on suunniteltu vähentämään tasasuuntaista jännitteen aaltoilua. Aaltoilun tasoitus lasketaan tasoituskertoimella q.
Tasoitussuodattimien pääelementit ovat kondensaattorit, induktorit ja transistorit, joiden resistanssi on erilainen tasa- ja vaihtovirroille.
Suodatinelementin tyypistä riippuen erotetaan kapasitiiviset, induktiiviset ja elektroniset suodattimet. Suodatuslinkkien lukumäärän mukaan suodattimet jaetaan yksilinkki- ja monilinkkisiin.
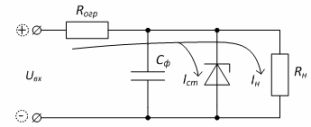
Kapasitiivinen suodatin on suuren kapasiteetin omaava kondensaattori, joka on kytketty rinnan kuormitusvastuksen Rn kanssa. Kondensaattorilla on korkea DC-vastus ja pieni vaihtovirtavastus. Tarkastellaan suodattimen toimintaa puoliaaltotasasuuntauspiirin esimerkissä (kuva 1, a).
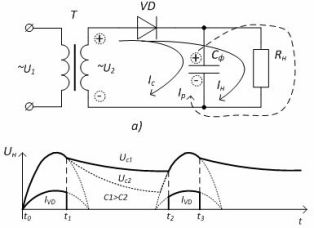
Kuva 1 - Yksivaiheinen puoliaaltotasasuuntaaja kapasitiivisella suodattimella: a) piiri b) toiminnan ajoituskaaviot
Kun positiivinen puoliaalto kulkee aikavälillä t0 — t1 (kuva 2.63, b), kuormitusvirta (diodivirta) ja kondensaattorin varausvirta kulkevat.Kondensaattori latautuu ja hetkellä t1 kondensaattorin jännite ylittää toisiokäämin jännitehäviön — diodi sulkeutuu ja aikavälillä t1 — t2 kuormituksen virta saadaan aikaan kondensaattorin purkauksella. Che. kuorman virta kulkee jatkuvasti, mikä vähentää merkittävästi tasasuunnatun jännitteen aaltoilua.
Mitä suurempi kondensaattorin Cf kapasitanssi on, sitä pienempi on heräte. Tämä määräytyy kondensaattorin purkausajan perusteella — purkausaikavakiolla τ = СfRн. Kohdassa τ> 10 tasoituskerroin määritetään kaavalla q = 2π fc m Cf Rn, missä fc on verkon taajuus, m on tasasuuntaisen jännitteen puolijaksojen lukumäärä.
On suositeltavaa käyttää kapasitiivista suodatinta korkearesistanssilla RH-kuormitusvastuksella pienillä kuormitustehoilla.
Induktiivinen suodatin (rikastin) on kytketty sarjaan Rn:n kanssa (kuva 3, a). Induktanssilla on alhainen DC-resistanssi ja korkea AC-resistanssi. Ripple-tasoitus perustuu itseinduktioilmiöön, joka aluksi estää virran kasvun ja sitten tukee sitä sen pienentymisellä (kuva 2, b).
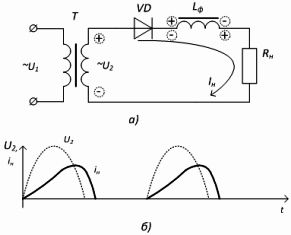
Kuva 2-Yksivaiheinen puoliaaltotasasuuntaaja induktiivisella suodattimella: a) piiri, b) toiminnan ajoituskaaviot
Induktiivisia suodattimia käytetään keski- ja suuritehoisissa tasasuuntaajissa, eli tasasuuntaajissa, jotka toimivat suurilla kuormitusvirroilla.
Tasoituskerroin määritetään kaavalla: q = 2π fs m Lf / Rn
Kapasitiivisen ja induktiivisen suodattimen toiminta perustuu siihen, että verkon kuluttaman virran kulun aikana kondensaattori ja induktori varastoivat energiaa ja kun verkosta ei tule virtaa tai se pienenee, elementit antavat varastoidun energian sammutus, joka säilyttää virran (jännitteen) kuormassa.
Moniliitossuodattimet käyttävät sekä kondensaattorien että induktorien tasoitusominaisuuksia. Pienitehoisissa tasasuuntaajissa, joissa kuormitusvastuksen resistanssi on useita kOhmeja, on kuristimen Lf sijasta mukana vastus Rf, mikä vähentää merkittävästi suodattimen massaa ja mittoja.
Kuvassa 3 on esitetty LC- ja RC-tikkaassuodattimien tyypit.
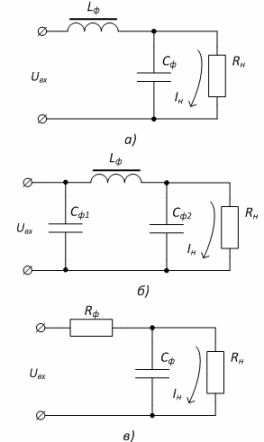
Kuva 3-Moniliitossuodattimet: a) L-muotoinen LC, b) U-muotoinen LC, c) RC-suodatin
Stabilisaattorit on suunniteltu vakauttamaan kuorman vakiojännitettä (virtaa) verkkojännitteen vaihteluiden ja kuorman kuluttaman virran muutosten aikana.
Stabilisaattorit jaetaan jännitteen ja virran stabilaattoreihin sekä parametrisiin ja kompensointiin. Lähtöjännitteen stabiilisuus arvioidaan stabilointikertoimella Kst.
Parametrinen stabilisaattori, joka perustuu elementin käyttöön, jolla on epälineaarinen ominaisuus - puolijohde-zener-diodi Zener-diodin jännite on lähes vakio ja laitteen läpi kulkeva käänteinen virta muuttuu merkittävästi.
Parametrinen stabilointipiiri on esitetty kuvassa 4. Tulojännite UBX on jaettu rajoitusvastuksen Rlim ja rinnankytketyn zener-diodin VD ja kuormitusvastuksen Rn välillä.
Kuva 4 – Parametrinen stabilisaattori
Kun tulojännite kasvaa, Zener-diodin läpi kulkeva virta kasvaa, mikä tarkoittaa, että virta rajoitusvastuksen läpi kasvaa ja sen yli tapahtuu suurempi jännitehäviö ja kuormitusjännite pysyy ennallaan.
Parametrisen stabilisaattorin Kst on luokkaa 20-50. Tämän tyyppisten stabilointilaitteiden haittoja ovat alhaiset stabilointivirrat ja alhainen hyötysuhde.
Parametrisia stabilaattoreita käytetään apujännitelähteinä sekä silloin, kun kuormitusvirta on pieni - enintään satoja milliampeeria.
Kompensoiva stabilisaattori käyttää transistorin muuttuvaa resistanssia rajoittavana vastuksena. Tulojännitteen kasvaessa myös transistorin resistanssi kasvaa, vastaavasti jännitteen pienentyessä resistanssi pienenee. Tässä tapauksessa kuorman jännite pysyy muuttumattomana.
Transistorien stabilointipiiri on esitetty kuvassa 5. Lähtöjännitteen URn säätöperiaate perustuu säätötransistorin VT1 johtavuuden muutokseen.
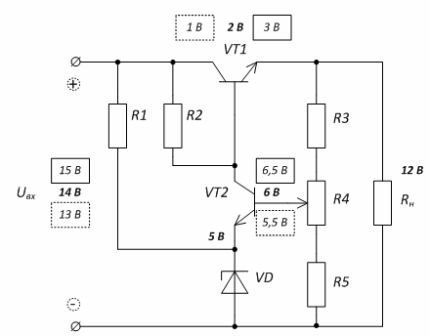
Kuva 5 – Kaavio kompensoivasta jännitesäätimestä
Jännitevertailupiiri ja DC-vahvistin on koottu transistoriin VT2. Mittauspiiri R3, R4, R5 sisältyy sen peruspiiriin ja referenssijännitelähde R1VD sisältyy emitteripiiriin.
Esimerkiksi tulojännitteen kasvaessa myös lähtö kasvaa, mikä johtaa jännitteen nousuun transistorin VT2 kannalla, samalla kun emitterin VT2 potentiaali pysyy samana.Tämä johtaa kantavirran kasvuun ja siten transistorin VT2 kollektorivirran kasvuun — transistorin VT1 kantapotentiaali pienenee, transistori sulkeutuu ja siinä tapahtuu suurempi jännitehäviö ja lähtöjännite laskee. pysyä muuttumattomana.
Nykyään stabilisaattoreita valmistetaan integroitujen piirien muodossa. Tyypillinen kaavio integroidun stabilisaattorin käynnistämiseksi on esitetty kuvassa 6.
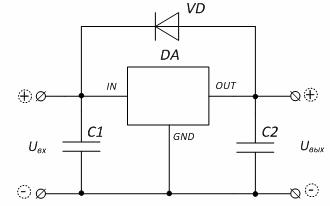
Kuva 6 – Tyypillinen kaavio sisäänrakennetun jännitteen stabilisaattorin kytkemisestä päälle
Stabilisaattorin mikropiirin lähtöjen merkintä: «IN» — tulo, «OUT» — lähtö, «GND» — yhteinen (kotelo). Jos stabilointi on säädettävissä, on ulostulo «ADJ» - säätö.
Stabilisaattorin valinta perustuu lähtöjännitteen arvoon, maksimikuormitusvirtaan ja tulojännitteen vaihtelualueeseen.