Lineaariset jännitteen stabilisaattorit — käyttötarkoitus, perusparametrit ja kytkentäpiirit
Ehkä nykyään yksikään elektroniikkakortti ei tule toimeen ilman vähintään yhtä jatkuvan jatkuvan jännitteen lähdettä. Ja hyvin usein lineaariset jännitesäätimet mikropiirien muodossa toimivat tällaisina lähteinä. Toisin kuin muuntajalla varustetussa tasasuuntaajassa, jossa jännite tavalla tai toisella riippuu kuormitusvirrasta ja voi vaihdella hieman eri syistä, integroitu mikropiiri - stabilisaattori (säädin) pystyy tarjoamaan vakiojännitteen tarkasti määritellyllä alueella kuormitusvirrat.

Nämä mikropiirit on rakennettu kenttä- tai bipolaaristen transistoreiden pohjalta, jotka toimivat jatkuvasti aktiivisessa tilassa. Säätötransistorin lisäksi ohjauspiiri on asennettu myös lineaarisen stabilisaattorin mikropiirin kiteeseen.
Historiallisesti, ennen kuin tällaisia stabilaattoreita oli mahdollista valmistaa mikropiirien muodossa, oli kysymys parametrien lämpötilastabiilisuuden ongelman ratkaisemisesta, koska lämmityksen aikana käytön aikana mikropiirisolmujen parametrit muuttuvat.
Ratkaisu syntyi vuonna 1967, kun amerikkalainen elektroniikkainsinööri Robert Widlar ehdotti stabilointipiiriä, jossa säätelemättömän tulojännitelähteen ja kuorman väliin kytkettäisiin säätötransistori ja lämpötilakompensoidulla referenssijännitteellä varustettu virhevahvistin. ohjauspiiri. Tämän seurauksena lineaaristen integroitujen stabilointilaitteiden suosio markkinoilla hyppäsi nopeasti.
Katso alla oleva valokuva. Tässä on yksinkertaistettu kaavio lineaarisesta jännitesäätimestä (kuten LM310 tai 142ENxx). Tässä järjestelmässä ei-invertoiva negatiivisen jännitteen takaisinkytkentäoperaatiovahvistin ohjaa lähtövirtaansa käyttämällä säätötransistorin VT1 lukituksen avausastetta, joka on kytketty piiriin yhteisen kollektori-emitteriseuraajan kanssa.
Itse operaatiovahvistin saa virtaa tulolähteestä unipolaarisen positiivisen jännitteen muodossa. Ja vaikka negatiivinen jännite ei sovellu syötettäväksi täällä, op-vahvistimen syöttöjännite voidaan kaksinkertaistaa ilman ongelmia, ilman pelkoa ylikuormituksesta tai vaurioista.
Johtopäätös on, että syvä negatiivinen takaisinkytkentä neutraloi tulojännitteen epävakauden, jonka arvo tässä piirissä voi olla 30 volttia. Joten kiinteät lähtöjännitteet vaihtelevat välillä 1,2 - 27 volttia sirumallista riippuen.
Stabilisaattorin mikropiirissä on perinteisesti kolme nastaa: tulo, yhteinen ja lähtö.Kuvassa on tyypillinen differentiaalivahvistimen piiri osana mikropiiriä referenssijännitteen saamiseksi Zener-diodi käytössä.
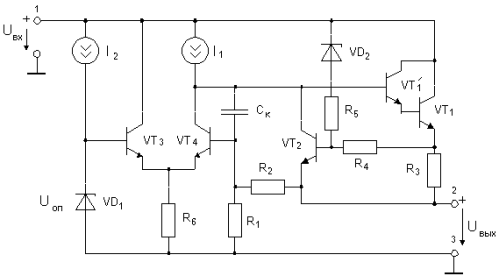
Pienjännitesäätimissä jännitereferenssi saadaan raosta, kuten Widlar ehdotti ensimmäisessä lineaarisessa integroidussa säätimessään, LM109:ssä. Vastusten R1 ja R2 negatiiviseen takaisinkytkentäpiiriin asennetaan jakaja, jonka vaikutuksesta lähtöjännite osoittautuu yksinkertaisesti verrannolliseksi referenssijännitteeseen kaavan Uout = Uvd (1 + R2 / R1) mukaisesti.
Stabilisaattoriin sisäänrakennettu vastus R3 ja transistori VT2 rajoittavat lähtövirtaa, joten jos virranrajoitusvastuksen jännite ylittää 0,6 volttia, transistori VT2 avautuu välittömästi, jolloin pääohjaustransistorin VT1 kantavirta katkeaa. rajoitettu. Osoittautuu, että lähtövirta stabilisaattorin normaalissa toimintatilassa on rajoitettu arvoon 0,6 / R3. Säätötransistorin johtama teho riippuu tulojännitteestä ja on 0,6 (Uin - Uout) / R3.
Jos jostain syystä oikosulku tapahtuu integroidun stabilisaattorin lähdössä, kiteen hajaantuvaa tehoa ei tulisi jättää ennalleen, verrannollinen jännite-eroon ja kääntäen verrannollinen vastuksen R3 resistanssiin. Siksi piiri sisältää suojaelementtejä - zener-diodi VD2 ja vastus R5, joiden toiminta asettaa virtasuojauksen tason riippuen jännite-erosta Uin -Uout.
Yllä olevasta kaaviosta näet, että suurin lähtövirta riippuu lähtöjännitteestä, joten lineaaristabilaattorin mikropiiri on luotettavasti suojattu ylikuormitukselta.Kun jännite-ero Uin-Uout ylittää zener-diodin VD2 stabilointijännitteen, vastusten R4 ja R5 jakaja tuottaa tarpeeksi virtaa transistorin VT2 kantaan sen sammuttamiseksi, mikä puolestaan aiheuttaa kantavirtarajan. säätötransistorin VT1 lisäämiseen.
Uusimmat lineaaristen säätimien mallit, kuten ADP3303, on varustettu ylikuormitussuojalla, kun lähtövirta laskee jyrkästi, kun kide kuumennetaan 165 °C:seen. Yllä olevan kaavion kondensaattoria tarvitaan taajuuden tasaamiseen.
Muuten, kondensaattoreista. On tapana kytkeä kondensaattoreita, joiden kapasiteetti on vähintään 100 nf, integroitujen stabilointilaitteiden tuloon ja lähtöön, jotta vältetään mikropiirin sisäisten piirien väärä aktivointi. Samaan aikaan on olemassa ns. korkittomat stabilaattorit, kuten REG103, joiden tuloon ja lähtöön ei tarvitse asentaa stabilointikondensaattoreita.
Kiinteällä lähtöjännitteellä varustettujen lineaaristen stabilaattoreiden lisäksi on myös stabilointia varten säädettävällä lähtöjännitteellä varustettuja stabilaattoreita. Niistä vastusten R1 ja R2 jakaja puuttuu, ja transistorin VT4 kanta tuodaan ulos sirun erilliseen haaraan ulkoisen jakajan kytkemiseksi, kuten 142EN4-sirussa.
Nykyaikaisemmissa stabilaattoreissa, joissa ohjauspiirin virrankulutus on vähennetty useisiin kymmeniin mikroampeereihin, kuten LM317, on vain kolme nastaa.Ollakseni rehellinen, toteamme, että nykyään on olemassa myös erittäin tarkkoja jännitesäätimiä, kuten TPS70151, jotka useiden lisänastojen ansiosta mahdollistavat jännitteenpudotussuojauksen kytkentäjohtimiin, kuorman purkauksen jne. .
Yllä puhuimme positiivisista jännitteen stabilaattoreista suhteessa yhteiseen johtoon. Samanlaisia järjestelmiä käytetään myös negatiivisten jännitteiden stabilointiin, riittää vain, että tulon lähtöjännite eristetään galvaanisesti yhteisestä pisteestä. Lähtönasta kytketään sitten yhteiseen lähtöpisteeseen, ja negatiivinen lähtöpiste on tulon miinuspiste, joka on kytketty stabilointisirun yhteiseen pisteeseen. Negatiivisen napaisuuden jännitteensäätimet, kuten 1168ENxx, ovat erittäin käteviä.
Jos on tarpeen saada kaksi jännitettä kerralla (positiivinen ja negatiivinen polariteetti), tätä tarkoitusta varten on olemassa erityisiä stabilaattoreita, jotka antavat symmetrisesti stabiloidun positiivisen ja negatiivisen jännitteen samanaikaisesti, riittää vain positiivisten ja negatiivisten tulojännitteiden käyttäminen. tuloihin. Esimerkki tällaisesta bipolaarisesta stabilisaattorista on KR142EN6.
Yllä oleva kuva on yksinkertaistettu kaavio siitä. Tässä differentiaalivahvistin #2 ohjaa transistoria VT2, joten yhtälö -UoutR1 / (R1 + R3) = -Uop havaitaan. Ja vahvistin #1 ohjaa transistoria VT1 niin, että potentiaali vastusten R2 ja R4 liitoksessa pysyy nollana. Jos samaan aikaan vastukset R2 ja R4 ovat yhtä suuret, lähtöjännite (positiivinen ja negatiivinen) pysyy symmetrisenä.
Kahden (positiivisen ja negatiivisen) lähtöjännitteen välisen tasapainon itsenäistä säätämistä varten voit kytkeä ylimääräisiä trimmausvastuksia mikropiirin erikoisnastoihin.
Yllä olevien lineaaristen säätöpiirien pienin jännitehäviö on 3 volttia. Tämä on melko paljon akku- tai akkukäyttöisille laitteille, ja yleensä on toivottavaa minimoida jännitehäviö. Tätä tarkoitusta varten lähtötransistori tehdään pnp-tyyppiseksi siten, että differentiaaliasteen kollektorivirta on samanaikaisesti säätötransistorin VT1 kantavirran kanssa. Pienin jännitehäviö on nyt 1 voltin luokkaa.
Negatiiviset jännitteensäätimet toimivat samalla tavalla minimaalisella roikkumalla. Esimerkiksi 1170ENxx-sarjan säätimien jännitehäviö on noin 0,6 volttia, eivätkä ne ylikuumene, kun ne on valmistettu TO-92-kotelossa kuormitusvirroilla 100 mA asti. Stabilisaattori itse kuluttaa enintään 1,2 mA.
Tällaiset stabilisaattorit luokitellaan matalan roikkumisen. Vielä pienempi jännitehäviö saavutetaan MOSFET-pohjaisilla säätimillä (noin 55 mV 1 mA sirun virrankulutuksella), kuten MAX8865-siru.
Jotkin stabilaattorimallit on varustettu sammutusnastoilla, jotka vähentävät laitteiden virrankulutusta valmiustilassa — kun logiikkatasoa käytetään tähän nastaan, stabilisaattorin kulutus laskee lähes nollaan (linja LT176x).
Kiinteistä lineaarisista stabilisaattoreista puhuttaessa ne huomioivat niiden ominaisuudet sekä dynaamiset ja tarkat parametrit.
Tarkkuusparametreja ovat stabilointikerroin, lähtöjännitteen asetustarkkuus, lähtöimpedanssi ja jännitteen lämpötilakerroin. Jokainen näistä parametreista on lueteltu dokumentaatiossa; ne liittyvät lähtöjännitteen tarkkuuteen riippuen tulojännitteestä ja kiteen nykyisestä lämpötilasta.
Dynaamiset parametrit, kuten aaltoilun vaimennussuhde ja lähtöimpedanssi, asetetaan kuormitusvirran ja tulojännitteen eri taajuuksille.
Suorituskykyominaisuudet, kuten tulojännitealue, nimellislähtöjännite, maksimikuormitusvirta, suurin tehohäviö, suurin tulo- ja lähtöjännitteen ero maksimikuormitusvirralla, tyhjäkäyntivirta, käyttölämpötila-alue, kaikki nämä parametrit vaikuttavat yhden tai toinen.vakain tietylle piirille.
Lineaaristen jännitesäätimien ominaisuudet
Tässä ovat tyypilliset ja suosituimmat piirit lineaaristen stabilointilaitteiden sisällyttämiseen:
Jos on tarpeen nostaa lineaarisen stabilisaattorin lähtöjännitettä kiinteällä lähtöjännitteellä, Zener-diodi lisätään sarjaan yhteiseen liittimeen:
Sallitun lähtövirran maksimoimiseksi tehokkaampi transistori kytketään rinnan stabilisaattorin kanssa, mikä muuttaa mikropiirin sisällä olevan säätötransistorin osaksi komposiittitransistoria:
Jos virtaa on tarpeen stabiloida, jännitteen stabilisaattori kytketään päälle seuraavan kaavion mukaisesti.
Tässä tapauksessa jännitehäviö vastuksen yli on yhtä suuri kuin stabilointijännite, mikä johtaa merkittäviin häviöihin, jos stabilointijännite on korkea.Tässä suhteessa on tarkoituksenmukaisempaa valita stabilisaattori alimmalle mahdolliselle lähtöjännitteelle, kuten KR142EN12 1,2 voltille.