Vaihemittarit ja synkroskoopit
 Vaihemittareiden avulla määritetään esimerkiksi vaihtovirran vaihekulma suhteessa sen aiheuttavaan jännitteeseen.
Vaihemittareiden avulla määritetään esimerkiksi vaihtovirran vaihekulma suhteessa sen aiheuttavaan jännitteeseen.
Vaihemittarin mittausmekanismin kiinteä osa sisältää kolme kelaa, joista kaksi 1 ja 2 ovat kehysten muotoisia. Ne on siirretty suhteessa toisiinsa 120 ° kulmassa (kuva 1, a). Sylinterimäinen kela 3 sijaitsee kelojen 1 ja 2 sisällä koaksiaalisesti liikkuvan osan kanssa.
Liikkuva osa muodostuu akselista 4, jonka päihin on kiinnitetty ytimet 5 ohuiden levyjen muodossa, jotka on siirretty toisistaan 180 ° ja joita kutsutaan terälehdiksi. Akseli ja terälehdet on valmistettu pehmeästä magneettisesta materiaalista ja muodostavat Z-muotoisen rakenteen (kuva 1, b). Mittausmekanismissa ei ole jousen aiheuttamaa vastakkaista momenttia, joten kyseessä oleva laite voidaan katsoa suhteiden ansioksi.
Kuvassa Kuvassa 2 on esitetty vaihemittarin päällekytkentäkaavio. Käämit 1 ja 2 sisältyvät kolmivaiheisen johdon katkaisuun, ja käämi 3 on sarjassa vastuksen Rd kanssa, jolla on merkittävä aktiivinen vastus, ja se on kytketty verkkojännitteeseen.Näiden käämien läpi kulkevat lineaariset virrat siirtyvät suhteessa toisiinsa vaiheittain 120 °, minkä yhteydessä käämit 1 ja 2 muodostavat pyörivän magneettivuon Ф12, ikään kuin ne edustavat kuormavirtavektoria. Sen pyörimistaajuus riippuu virtojen I1 ja I2 taajuudesta... Yhdessä jaksossa virtaus F12 tekee yhden täyden kierroksen.
Koska vastuksen Rq resistanssi on suuri verrattuna käämin 3 reaktanssiin, virta Az3 on vaiheessa verkkojännitteen kanssa. Käämi 3 muodostaa sinimuotoisen virranmuutoksen seurauksena sykkivän magneettivuon F3, joka on lähellä sinimuotoista. Tämän virtauksen symmetria-akseli on kiinteä avaruudessa ja on aina sama kuin mekanismin liikkuvan osan akseli. Vuo F3 on suljettu liikkuvan osan, terälehtien ja kiinteän ulkoisen sylinterimäisen magneettipiirin akselia 4 pitkin.
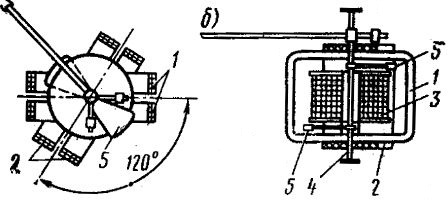
Riisi. 1. Z-muotoinen ydin sähkömagneettisen järjestelmän suhteen mittausmekanismi
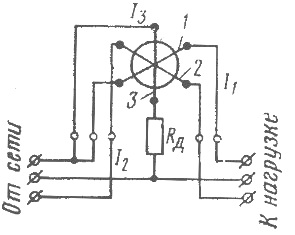
Riisi. 2. Sähkömagneettisen järjestelmän vaihemittarin piirikaavio
Eri tasoihin suljetut vuot F12 ja F3 magnetoivat mittausmekanismin liikkuvan osan. Koska vuon Ф12 arvo on vakio, akselin ja terälehtien magnetointi saavuttaa suurimman arvon sillä hetkellä, kun vuo Ф3 kulkee suurimman arvon läpi. Inertiavoimien vaikutuksesta liikkuva osa kiinnittyy liikkumattomana asentoon, joka vastaa sen suurinta magnetoitumista eli pyörivän vuon Ф12 asentoa sillä hetkellä, kun vuo Ф3 saavuttaa maksimiarvonsa.
On pidettävä mielessä, että pyörivän vuon sijainti suhteessa laitteen kiinteään osaan vuon Ф3 ja virran Аз3 kulkemisen hetkellä amplitudin arvon kautta riippuu kulman φ muutoksesta kuormitusvirran välillä. ja jännite. Tämän huomioon ottaen liikkuvan osan (ja vastaavasti laitteen osoittimen) miehittämä asema asteikon suhteen, ts. kulma α kuvaa kuormitusvirran ja jännitteen välistä vaihesiirtoa.
Tällä periaatteella toimiva fasometri mittaa vaihesiirtoja kapasitiivisilla ja induktiivisilla kuormilla. Laitteen asteikko voidaan jakaa kulma-arvoihin φ tai cosφ... Ensimmäisessä tapauksessa se on tasainen, toisessa se on epätasainen.
Fasometri Ts302
Synkronoskoopit
Tarkasteltavana olevaa mittausmekanismia käytetään myös synkroskoopissa, laitteessa, jota käytetään kytkettäessä synkronisia generaattoreita rinnakkaiskäyttöön.
Synkroskoopin päälle kytkemisen kaavio on esitetty kuvassa. 3.
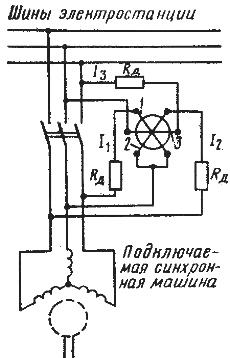
Riisi. 3. Sähkömagneettisen järjestelmän synkronoskoopin piirikaavio
Mittausmekanismin kelojen 1, 2 ja 3 rakenne on samanlainen kuin vaihemittarin vastaavien kelojen rakenne, mutta ne on valmistettu ohuesta kuparilangasta, jossa on suuri kierrosluku, jonka seurauksena kelat niillä on merkittävä vastus. Kela 3 on kytketty verkon verkkojännitteeseen, käämit 1 ja 2 - kytketyn synkronisen koneen verkkojännitteisiin. Vastukset on kytketty sarjaan kelojen R ja niin edelleen kanssa.
Kuten mainittiin, mittausmekanismin liikkuva osa on asennettu kolmen kelan tuloksena olevaan magneettikenttään siten, että liikkuvan osan keilojen akseli osuu yhteen pyörivän kentän Ф12 suunnan kanssa, jossa se vangitaan. sykkivän kentän amplitudiarvo F3.
Tämä liikkuvan osan keilojen sijainti samalla virran taajuudella käämien käämeissä riippuu vaihesiirrosta virtojen I1 ja Az2 välillä käämien 1, 2 käämeissä ja virrasta Az3 käämien käämissä. käämi 3. Virrat I1 ja Az2 ovat käytännössä samassa vaiheessa synkronisen generaattorin verkkojännitteen kanssa ja virta Az3 — verkkojännitteen kanssa (vastuksen resistanssista Rq on suuri).
Seurauksena ° С Synkroskoopin osoitinlaite, kun verkkovirran ja kytketyn generaattorin taajuudet ovat samat, osoittaa suoraan näiden kolmivaiheisten järjestelmien linjajännitteiden välisen vaihesiirron.
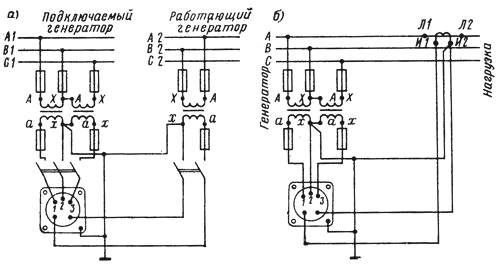
Riisi. 4. Kytkentäkaaviot: a — synkroskooppi, b — sähkömagneettisen järjestelmän fasometri

Riisi. 5. Synkronoskooppi tyyppi E1605
Synkronoitaessa verkkovirran taajuus ja kytketyn generaattorin virta eivät ole samat. Tämä johtaa jatkuvaan muutokseen vaihekulmassa verkkojännitteen ja e. jne. v. generaattori ja siten terälehtien sijainnin muutokseen suhteessa paikallaan oleviin keloihin. Koska synkroskoopin liikkuvaa osaa voidaan kääntää mihin tahansa kulmaan, osoitin pyörii.
Pyörimissuunta riippuu verkkojännitteen ja kytketyn generaattorin välisen taajuuseron etumerkistä. Mitä pienempi tämä ero, sitä hitaammin tahdistusosoittimen pyöriminen on.
Laitteen asteikolla on jännitevektorien vastavaihekohtaa vastaava etumerkki ja esim. jne.v. synkronoidut objektit. Synkroninen kone on kytkettävä asemaväyliin e:n vektorien kaasunaamariaseman aikana. jne. pp. ja väyläjännitteet.
Kuvassa Kuva 4 esittää sähkömagneettisen vaihemittarin kytkentäkaaviota ja sähkömagneettisen synkroskoopin kytkentäkaaviota.