Taajuusmuuttajan toimintaperiaate ja sen valintakriteerit käyttäjälle
 Lyhyt kuvaus tarkoituksesta, toimintaperiaatteesta ja kriteereistä taajuusmuuttajan valinnassa asynkronisen sähkömoottorin ohjauslaitteeksi.
Lyhyt kuvaus tarkoituksesta, toimintaperiaatteesta ja kriteereistä taajuusmuuttajan valinnassa asynkronisen sähkömoottorin ohjauslaitteeksi.
Oravahäkin oikosulkumoottori nykyään se on massiivinen ja luotettavin laite erilaisten koneiden ja mekanismien ohjaamiseen. Mutta jokaisella mitalilla on kääntöpuolensa.
Induktiomoottorin kaksi pääasiallista haittaa ovat yksinkertaisuuden mahdottomuus roottorin nopeuden säätö, erittäin suuri käynnistysvirta - viisi, seitsemän kertaa nimellisvirta. Jos käytetään vain mekaanisia ohjauslaitteita, nämä haitat johtavat suuriin energiahäviöihin ja mekaanisiin iskukuormitukseen. Tällä on erittäin negatiivinen vaikutus laitteen käyttöikään.
TAAJUUSMUUNNIN

TAAJUUSMUUNNIN pulssinleveyssäädöllä (PE ja PWM) vähentää syöttövirtoja 4-5 kertaa. Se käynnistää oikosulkumoottorin tasaisesti ja ohjaa taajuusmuuttajaa tietyn jännite/taajuus-suhteen mukaan.
Taajuusmuuttaja säästää energiaa jopa 50 %. Tulee mahdolliseksi sallia palaute viereisten laitteiden välillä, esim. itsesäätyviä laitteita tehtävään ja muuttaa koko järjestelmän toimintaolosuhteita.
Taajuusmuuttajan toimintaperiaate
PWM-taajuusmuuttaja on kaksoismuunnos invertteri… Ensin verkkojännite 220 tai 380 V tasasuunnetaan tulodiodisillalla, sitten se tasoitetaan ja suodatetaan kondensaattoreilla.
Tämä on muutoksen ensimmäinen vaihe. Toisessa vaiheessa vakiojännitteestä käyttämällä ohjausmikropiirejä ja lähtösiltaa IGBT kytkimet, muodostuu PWM-sekvenssi tietyllä taajuudella ja toimintajaksolla. Taajuusmuuttajan lähdössä lähetetään suorakaiteen muotoisia pulsseja, mutta oikosulkumoottorin staattorikäämien induktanssin vuoksi ne integroidaan ja lopulta muuttuvat jännitteeksi, joka on lähellä siniaaltoa.
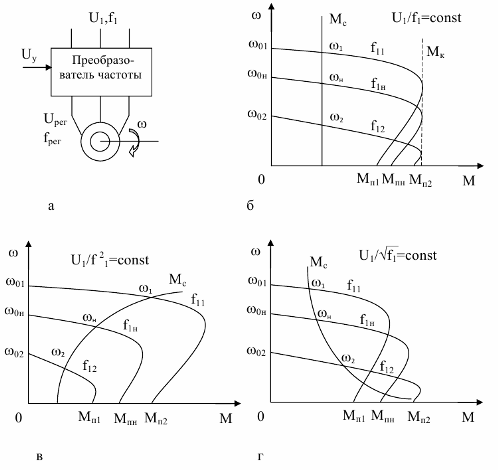 Asynkronisen sähkömoottorin mekaaniset ominaisuudet nopeuden taajuussäädöllä: a — kytkentäkaavio; b — ominaisuudet kuormalle, jolla on vakio staattinen vastusmomentti; c — puhaltimen kuormitusominaisuudet; d — staattisen kuorman vääntömomentin ominaisuudet, kääntäen verrannollinen pyörimiskulmanopeuteen.
Asynkronisen sähkömoottorin mekaaniset ominaisuudet nopeuden taajuussäädöllä: a — kytkentäkaavio; b — ominaisuudet kuormalle, jolla on vakio staattinen vastusmomentti; c — puhaltimen kuormitusominaisuudet; d — staattisen kuorman vääntömomentin ominaisuudet, kääntäen verrannollinen pyörimiskulmanopeuteen.
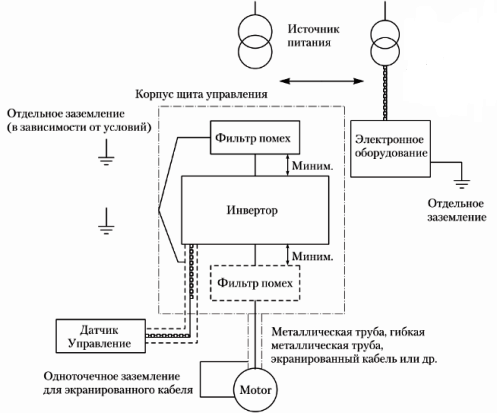 Tyypillinen piiri taajuusmuuttajan päälle kytkemiseen
Tyypillinen piiri taajuusmuuttajan päälle kytkemiseen 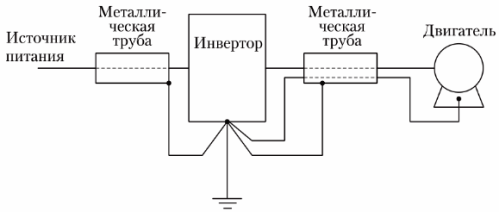 Esimerkki voimalinjojen (kaapeleiden) kytkemisestä taajuusmuuttajapiiriin
Esimerkki voimalinjojen (kaapeleiden) kytkemisestä taajuusmuuttajapiiriin
Taajuusmuuttajien valintaperusteet

Valvontamenetelmällä
Hävitä välittömästi ne muuntimet, jotka eivät sovellu tehoon, suorituskykyyn, ylikuormituskapasiteettiin jne. Johdon tyypin mukaan sinun on päätettävä, mitä valita, skalaari- tai vektoriohjaus.
Useimmat nykyaikaiset taajuusmuuttajat toteuttavat vektoriohjauksen, mutta tällaiset taajuusmuuttajat ovat kalliimpia kuin skalaaritaajuusmuuttajat.
Vektoriohjaus mahdollistaa tarkemman ohjauksen vähentämällä staattista virhettä. Skalaaritila tukee vain vakiosuhdetta lähtöjännitteen ja lähtötaajuuden välillä, mutta esimerkiksi puhaltimille tämä riittää.
Sen perustamisesta lähtien vektoriohjauksesta on tullut erittäin suosittu ohjausstrategia induktiomoottoreissa. Tällä hetkellä useimmat taajuusmuuttajat toteuttavat vektoriohjauksen tai jopa anturittoman vektoriohjauksen (tämä suuntaus löytyy taajuusmuuttajista, jotka alun perin toteuttavat skalaariohjauksen ja joissa ei ole nopeusanturin liittämistä).
Vektoriohjauksen perusperiaate koostuu erillisestä itsenäisestä moottorin magnetointivirran ja kvadratuurivirran säädöstä, johon akselin mekaaninen vääntömomentti on verrannollinen. Magnetointivirta määrittää roottorin nollavuon arvon ja pysyy vakiona.
Kun nopeus tasaantuu, kvadratuurivirran asetuspiste muodostetaan erillisellä PI-säätimellä, jonka tulona on halutun ja mitatun moottorin nopeuden välinen ero. Siten kvadratuurivirta asetetaan aina minimitasolle riittävän mekaanisen vääntömomentin aikaansaamiseksi asetetun nopeuden ylläpitämiseksi. Siksi vektoriohjauksella on korkea energiatehokkuus.
Voiman kautta
Jos laitteiden teho on suunnilleen sama, valitse saman yrityksen muuntimet, joiden kapasiteetti on maksimikuorman tehon mukainen. Tämä varmistaa vaihdettavuuden ja yksinkertaistaa laitteiden huoltoa. On suositeltavaa, että valitun taajuusmuuttajan huoltokeskus on kaupungissasi.
Verkkojännitteen kautta
Valitse aina muuntaja, jolla on mahdollisimman laaja jännitealue sekä alas- että ylöspäin. Tosiasia on, että paikallisissa verkoissa sana standardi voi saada vain naurua kyynelten läpi. Jos alhainen jännite todennäköisimmin aiheuttaa taajuusmuuttajan pysähtymisen, kohonnut jännite voi aiheuttaa sähköverkon elektrolyyttikondensaattorien räjähtämisen ja laitteen tulon epäonnistumisen.
Taajuussäätöalueen mukaan

Ohjaustulojen lukumäärän mukaan
Ohjauskomentojen (käynnistys, pysäytys, peruutus, pysäytys jne.) syöttämiseen tarvitaan erilliset tulot. Analogisia tuloja tarvitaan takaisinkytkentäsignaaleja varten (taajuusmuuttajan asetus ja säätö käytön aikana). Digitaalisia tuloja tarvitaan korkeataajuisten signaalien syöttämiseen digitaalisista nopeus- ja paikkaantureista (kooderit). Tulojen määrä ei voi koskaan olla liian suuri, mutta mitä enemmän tuloja, sitä monimutkaisempi järjestelmä voidaan rakentaa ja sitä kalliimpi se on.
Lähtösignaalien lukumäärän mukaan
Diskreettejä lähtöjä käytetään lähettämään signaaleja eri tapahtumia varten (hälytys, ylikuumeneminen, tulojännite tason ylä- tai alapuolella, virhesignaali jne.). Analogisia lähtöjä käytetään monimutkaisten palautejärjestelmien rakentamiseen. Valintasuositukset ovat samanlaisia kuin edellisessä kappaleessa.
Ohjausväylä
Laitteissa, joilla ohjaat taajuusmuuttajaa, on oltava sama väylä ja sama tulojen/lähtöjen määrä kuin valitulla taajuusmuuttajalla. Jätä tilaa tuloille ja lähdöille tulevia päivityksiä varten.
Takuun alainen
Takuuajan avulla voit epäsuorasti arvioida taajuusmuuttajan luotettavuutta. Luonnollisesti sinun tulee valita taajuusmuuttaja pitkän aikavälin suunnitelmalla.Jotkut valmistajat varaavat erityisesti vahinkotapauksia, joita takuu ei kata. Lue aina asiakirjat huolellisesti ja hae verkosta laitemalleihin ja valmistajiin liittyviä arvosteluja. Tämä auttaa sinua tekemään oikean valinnan. Älä säästä rahaa laadukkaaseen palveluun ja henkilöstön koulutukseen.
 Taajuusmuuttaja telineessä
Taajuusmuuttaja telineessä
Ylikuormituskapasiteetti
Ensimmäisenä arviona taajuusmuuttajan teho tulee valita 10-15 % enemmän kuin moottorin teho. Muuntimen virran tulee olla suurempi kuin moottorin nimellisvirta ja hieman suurempi kuin mahdollisten ylikuormitusvirta.
Tietyn mekanismin kuvauksessa yleensä ilmoitetaan ylikuormitusvirrat ja niiden virtauksen kesto. Lue dokumentaatio! Tämä viihdyttää sinua ja ehkäisee laitevaurioita tulevaisuudessa. Jos taajuusmuuttajalle on ominaista myös isku- (huippu) kuormitus (kuormitus 2-3 sekuntia), on tarpeen valita huippuvirran muuntaja. Ota taas 10 % marginaali.
Katso myös tästä aiheesta: VLT AQUA Drive -taajuusmuuttajat pumppuyksiköihin