Sähkömoottoreiden ja tuotantomekanismien mekaaniset ominaisuudet
 Sähkökäyttöä suunniteltaessa sähkömoottori on valittava siten, että sen mekaaniset ominaisuudet vastaavat tuotantomekanismin mekaanisia ominaisuuksia. Mekaaniset ominaisuudet antavat muuttujien suhteen vakaassa tilassa.
Sähkökäyttöä suunniteltaessa sähkömoottori on valittava siten, että sen mekaaniset ominaisuudet vastaavat tuotantomekanismin mekaanisia ominaisuuksia. Mekaaniset ominaisuudet antavat muuttujien suhteen vakaassa tilassa.
Mekanismin mekaanista ominaisuutta kutsutaan kulmanopeuden ja mekanismin vastusmomentin väliseksi suhteeksi, vähennettynä moottorin akseliin) ω = f (Mc).
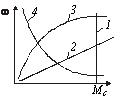
Riisi. 1. Mekanismien mekaaniset ominaisuudet
Kaiken lajikkeen joukossa on useita tyypillisiä mekanismien mekaanisia ominaisuuksia:
1. Ominaista nopeudesta riippumattomalla vastusmomentilla (suora viiva 1 kuvassa 1). Nopeudesta riippumaton mekaaninen ominaisuus piirretään pyörimisakselin suuntaisena suorana, tässä tapauksessa pystysuorana. Tällainen ominaisuus on esimerkiksi nostureilla, vinsseillä, mäntäpumpuilla, joiden syöttökorkeus on vakio, jne.
2.Ominaisuus, jonka vastusmomentti riippuu lineaarisesti nopeudesta (rivi 2 kuvassa 1). Tämä riippuvuus on ominaista esimerkiksi itsenäisesti virittyvän tasavirtageneraattorin käytölle, joka toimii vakiokuormalla.
3. Ominaista epälineaarisella vääntömomentin kasvulla (käyrä 3 kuvassa 1). Tyypillisiä esimerkkejä ovat puhaltimien, keskipakopumppujen ja potkurien toiminta. Näille mekanismeille momentti Mc riippuu kulmanopeuden ω neliöstä... Tämä on ns. parabolinen (tuulettimen) mekaaninen ominaisuus.
4. Epälineaarisesti pienenevä vastusmomentti (käyrä 4 kuvassa 1). Tässä vetomomentti on kääntäen verrannollinen pyörimisnopeuteen. Tässä tapauksessa teho pysyy vakiona koko mekanismin toimintanopeusalueella. Esimerkiksi joidenkin metallinleikkauskoneiden pääliikkeen mekanismeissa (sorvaus, jyrsintä, poraus) momentti Mc muuttuu kääntäen verrannollisesti ω:hen ja mekanismin käyttämä teho pysyy vakiona.
Sähkömoottorin mekaanisia ominaisuuksia kutsutaan sen kulmanopeuden riippuvuudeksi vääntömomentista ωd = f (M). Tässä on pidettävä mielessä, että momentilla M moottorin akselilla on pyörimissuunnasta riippumatta positiivinen merkki - liikehetki. Samaan aikaan vastustushetkellä Mc on negatiivinen etumerkki.
Esimerkkeinä kuv. Kuva 2 esittää mekaaniset ominaisuudet: 1 — synkroninen moottori; 2 — Tasavirtamoottori itsenäisellä herätyksellä; 3 — DC-moottori sarjavirityksellä.
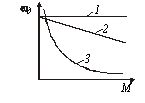 Riisi. 2. Sähkömoottorien mekaaniset ominaisuudet
Riisi. 2. Sähkömoottorien mekaaniset ominaisuudet
Sähkökäytön mekaanisten ominaisuuksien ominaisuuksien arvioimiseksi käytetään ominaisjäykkyyden käsitettä.Mekaanisen ominaisuuden jäykkyys määräytyy lausekkeen mukaan
β = dM/dω
missä dM — moottorin vääntömomentin muutos; dωd — vastaava muutos kulmanopeudessa.
Lineaarisille ominaisuuksille arvo β pysyy vakiona, epälineaarisille se riippuu toimintapisteestä.
Tätä käsitettä käyttämällä kuvassa 2 esitetyt ominaisuudet. 2, voidaan laadullisesti arvioida seuraavasti: 1 — ehdottoman jäykkä (β = ∞); 2 - kiinteä; 3 - pehmeä.
Ehdottoman vaikea ominaisuus — moottorin pyörimisnopeus pysyy muuttumattomana, kun moottorin kuormitus muuttuu nollasta nimellisarvoon. Synkronisilla moottoreilla on tämä ominaisuus.
Jäykkä ominaisuus — pyörimisnopeus muuttuu vähän, kun kuorma muuttuu nollasta nimellisarvoon. Tämä ominaisuus on rinnakkaisherätetyllä tasavirtamoottorilla sekä oikosulkumoottorilla ominaisuuden lineaarisen osan alueella.
Jäykkänä ominaisuutena pidetään sellaista, jossa nopeuden muutos ei ylitä noin 10 % nimellisnopeudesta, kun kuorma muutetaan nollasta nimellisarvoon.
Pehmeä ominaisuus — moottorin nopeus muuttuu merkittävästi suhteellisen pienillä kuormituksen muutoksilla. Tämä ominaisuus on tasavirtamoottorilla, jossa on sarja-, seka- tai rinnakkaisherätys, mutta lisävastus ankkuripiirissä sekä asynkroninen vastuksen kanssa roottoripiirissä.
Useimmissa tuotantomekanismeissa käytetään asynkronisia oravahäkkimoottoreita, joilla on jäykät mekaaniset ominaisuudet.
Kaikki sähkömoottoreiden mekaaniset ominaisuudet on jaettu luonnollisiin ja keinotekoisiin.
Luonnolliset mekaaniset ominaisuudet viittaavat moottorin käyttöolosuhteisiin parametrien nimellisarvoilla.
Esimerkiksi rinnakkaisherätetylle moottorille luonnollinen ominaisuus voidaan piirtää tapaukseen, jossa ankkurijännitteellä ja viritysvirralla on nimellisarvot ja ankkuripiirissä ei ole lisävastusta.
Induktiomoottorin luonnollinen ominaisuus vastaa moottorin staattoriin syötettävän vaihtovirran nimellisjännitettä ja nimellistaajuutta edellyttäen, että roottoripiirissä ei ole lisävastusta.
Siten jokaiselle moottorille voidaan rakentaa vain yksi luonnollinen ominaisuus ja rajoittamaton määrä keinotekoisia. Esimerkiksi tasavirtamoottorin tai oikosulkumoottorin roottoripiirin jokaisella uudella ankkurivastuksen arvolla on omat mekaaniset ominaisuutensa.
