Häkissä olevan induktiomoottorin tyristoriohjaus
 Asynkronisen moottorin ohjaamiseen voidaan käyttää tyristoreita yhdessä rele-kontaktorilaitteiden kanssa. Tyristoreita käytetään tehoelementteinä ja ne sisältyvät staattoripiiriin, rele-kontaktorilaitteet sisältyvät ohjauspiiriin.
Asynkronisen moottorin ohjaamiseen voidaan käyttää tyristoreita yhdessä rele-kontaktorilaitteiden kanssa. Tyristoreita käytetään tehoelementteinä ja ne sisältyvät staattoripiiriin, rele-kontaktorilaitteet sisältyvät ohjauspiiriin.
Käyttämällä tyristoreita tehokytkiminä on mahdollista syöttää jännite nollasta nimellisarvoon staattoriin käynnistyksen yhteydessä, rajoittaa moottorin virtoja ja vääntömomentteja, suorittaa tehokkaan jarrutuksen tai askeltoiminnan. Tällainen kaavio on esitetty kuvassa. 1.
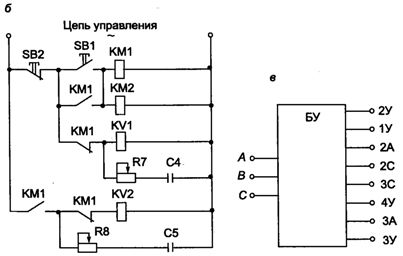
Piirin tehonsyöttöosa koostuu ryhmästä tyristoreja VS1 ... VS4, jotka on kytketty vastasuuntaisesti vaiheiden A ja B kanssa. Vaiheiden A ja B väliin on kytketty oikosulkutyristori VS5. Piiri koostuu tehonsyöttöpiiristä (kuva 11). 1, a), ohjauspiiri (kuva 1, b) ja tyristoriohjausyksikkö — BU (kuva 1, c).
Moottorin käynnistämiseksi kytketään QF-kytkin päälle, painetaan "Start"-painiketta SB1, minkä seurauksena kontaktorit KM1 ja KM2 kytketään päälle.Tyristoriohjauselektrodeihin VS1 … VS4 syötetään pulsseja, jotka on siirretty 60° suhteessa syöttöjännitteeseen. Moottorin staattoriin syötetään pienempi jännite, mikä vähentää käynnistysvirtaa ja käynnistysmomenttia.
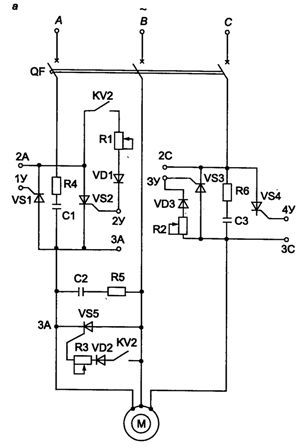
Riisi. 1. Oravahäkkiinduktiomoottorin tyristoriohjaus
Avautuva kosketin KM1 katkaisee releen KV1 aikaviiveellä, jonka määrää vastus R7 ja kondensaattori C4. KV1-releen avoimet koskettimet yhdistävät vastaavat vastukset ohjausyksikössä ja täysi verkkojännite syötetään staattoriin.
Pysäytä painamalla «Stop»-painiketta SB2. Ohjauspiirin teho katkeaa, tyristorit VS1 … VS4 sammuvat. Tämä johtaa siihen, että sammutusjakson aikana rele KV2 kytkeytyy päälle kondensaattorin C5 varastoiman energian vuoksi ja kytkee koskettimiensa kautta päälle tyristorit VS2 ja VS5. Staattorin vaiheiden A ja B kautta kulkee tasavirta, jota säätelevät vastukset R1 ja R3. Tehokas dynaaminen jarrutus.