Suljetut automaattiset ohjausjärjestelmät
 Suljetut automaattiset ohjausjärjestelmät (ACS) eroavat avoimista piireistä käytetyillä laitteilla ja automaation täydellisyydellä. ACS:n ollessa auki pääyksikkö (mukaan lukien ohjauslaitteet) ei saa tietoa sähköasennuksen (ajomoottori, käynnissä oleva kone) todellisesta toimintatilasta.
Suljetut automaattiset ohjausjärjestelmät (ACS) eroavat avoimista piireistä käytetyillä laitteilla ja automaation täydellisyydellä. ACS:n ollessa auki pääyksikkö (mukaan lukien ohjauslaitteet) ei saa tietoa sähköasennuksen (ajomoottori, käynnissä oleva kone) todellisesta toimintatilasta.
Suljetussa ASUB:ssa ohjauselementeille välitetään informaatiota, johon liittyy asianmukaisten komentosignaalien lähettäminen. Tällaista tietoa välittävä piiri sulkee ohjaussilmukan muodostaen suljetun ACS:n tai takaisinkytkentä-ACS:n.
Ero suljetun ja avoimen ACS:n välillä voidaan selittää esimerkillä sähkömoottorin nopeuden ohjauksesta generaattori-moottorijärjestelmässä (G-D). ACS:n ollessa auki (kuva 1, a) sähkömoottorin nopeus asetetaan manuaalisesti potentiometrillä P. Nopeuden säätö suoritetaan visuaalisesti takometrillä, joka saa virtansa TG-takogeneraattorista. Käyttäjä eliminoi kaikki nopeuspoikkeamat asetuspisteestä potentiometrin liukusäätimellä.
Suljetussa ACS:ssä (kuva.Kuvassa 1, b) TG-takogeneraattorin ankkuri sisältyy OVG-generaattorin herätepiiriin, mikä luo suljetun tai takaisinkytkentäjärjestelmän (tässä tapauksessa nopeuspalautteen kanssa).
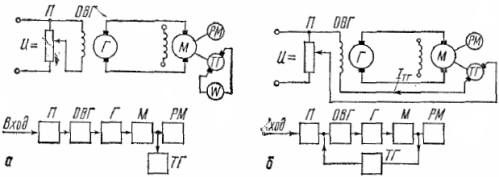
Riisi. 1. Sähkömoottorin ohjauspiiri G -M -järjestelmässä: a — avoin ACS, b — suljettu ACS
Takogeneraattorin muodostama virta (Aztg) suljetussa piirissä, joka on suunnattu potentiometrin (Azn) virtaan, ja tuloksena oleva virta vaikuttaa piirissä näiden virtojen geometrisen eron verran. Potentiometrin liukusäätimellä käyttäjä asettaa tuloksena olevan virran arvon OVG:n herätekäämiin, jolla sähkömoottorin vastaava nopeus saadaan aikaan. Tässä operaattorin rooli päättyy. Jatkossa järjestelmä ylläpitää automaattisesti sähkökäytön asetettua toimintatapaa tietyllä tarkkuudella.
Oletetaan, että kuormituspiikin seurauksena sähkömoottorin nopeus on laskenut määritettyyn verrattuna. Nopeuden alenemiseen liittyy vastaava aleneminen takogeneraattorin nopeudessa ja jännitteessä sen liittimissä. Tämä puolestaan johtaa virran Aztg laskuun takaisinkytkentäpiirissä ja potentiometrin liukusäätimen tietyssä asennossa - tuloksena olevan virran kasvuun generaattorin herätekäämissä. Generaattorin jännite ja moottorin nopeus kasvavat vastaavasti.
Nopeuden ja jännitteen nostoprosessi jatkuu, kunnes takaisinkytkentäsilmukan virta saavuttaa asetetun arvon ja moottorin nopeus saavuttaa asetetun arvon.
Automaattisten ohjausjärjestelmien analysoinnissa funktiokaavioita… KuvassaACS:n 2 lähetyksen toiminnallinen kaavio, joka sisältää seuraavat elementit:
1 — päälaite, joka asettaa toimintatavan, antaa komennon, käynnistyspulssin tai signaalin,
2 — vertailukohta. Se sisältää isäntälaitteen signaalin X1, signaalin X0, joka määrittää ohjatun arvon nopeuden tai tason. Ottaen huomioon yhdeksännen pääpalauteelementin signaalin, elementti 2 vertaa vastaanotettuja signaaleja ja lähettää lisäkorjatun signaalin X2,
3 - muunnoselementti, signaali op muuttaa sen toiseen muotoon, joka on kätevämpi jatkolähetystä varten. Esimerkiksi signaali X2 syötetään hydraulisena (pneumaattisena, mekaanisena) paineena, jonka elementti 3 muuntaa sähkövirraksi. Koska tällainen muunnos voi vaatia lisäenergiaa, elementti 3 on kytketty PE-energialähteeseen,
4 — lisäämällä elementin, se vastaanottaa kaksi signaalia: X3 ja X8 korjauselementiltä (muistielementiltä) 8. Nämä signaalit summataan elementillä 4 ja lähetetään seuraavaan elementtiin,
5 — vahvistuselementti, tulosignaali X1 voi olla heikko ja sitä on vahvistettava myöhempää lähetystä varten. Tämä tehdään elementin 5 kautta, joka on kytketty PE-virtalähteeseen,
6 — toimeenpaneva elementti, suorittaa vastaanotetun signaalin (sähkömoottori, sähkömagneettinen rele, servomoottori),
7 — säädettävä esine tai työkone.
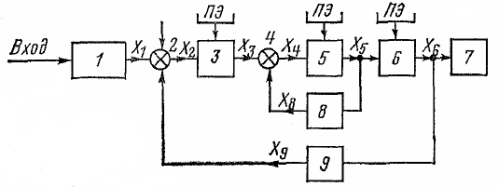
Riisi. 2. ACS:n toimintakaavio
Jokainen automaatioelementti on energianmuunnin, jonka tuloon syötetään arvo X' ja arvo X poistetaan lähdöstä. "Jokaisella paikallaan olevalla elementillä on tietty riippuvuus X" (X'), jota kutsutaan staattiseksi ominaispiirteeksi.
Suljetulle automaattiselle ohjausjärjestelmälle on ominaista palautteen läsnäolo; siinä on ainakin yksi takaisinkytkentäsilmukka, joka yhdistää järjestelmän lähdön sen tuloon. Lisäksi voi olla ns. sisäistä takaisinkytkentää, joka yhdistää yksittäisten ACS-elementtien lähdön ja tulon.
Palaute on jaettu kovaan ja joustavaan. Kovat rajoitukset toimivat sekä järjestelmän ohimenevässä että kiinteässä toimintatilassa, joustavat - vain ohimenevässä. Tee ero positiivisen ja negatiivisen palautteen välillä. Kun säädelty arvo kasvaa, positiivinen yhteys lisää sitä entisestään ja negatiivinen päinvastoin pienenee. Palautteet voivat lähettää signaaleja, jotka ovat verrannollisia pyörimiskulmaan, nopeuteen, jännitteeseen, virtaan jne. ja niitä kutsutaan vastaavasti kulman, nopeuden, jännitteen ja virran takaisinkytkennäksi. Katso lisätietoja täältä: Automaatiojärjestelmien elementit
Toimintaperiaatteen mukaan ACS voidaan jakaa kolmeen ryhmään:
-
jatkuva toiminta, jossa ohjattujen ja asetettujen arvojen välinen suhde ei katkea,
-
impulssitoiminto, jossa säädetyn ja asetettujen arvojen välinen yhteys tapahtuu säännöllisin väliajoin,
-
välitystoiminto, jossa viestintä tapahtuu vain, kun arvo saavuttaa tietyn arvon.
Sen mukaan, minkä lain mukaan tietty arvo muuttuu ajan myötä, ACS voidaan myös jakaa kolmeen ryhmään:
-
vakio tai matala asetusarvo järjestelmät, joissa automaattisesti ohjattu arvo pidetään vakiona. Nämä ovat vakautusjärjestelmiä, jotka ovat olennaisesti automaattisia ohjausjärjestelmiä (ACS),
-
järjestelmät, joissa tavoitearvoa muutetaan tietyn ennalta määrätyn ohjelman mukaisesti. Se on ohjelmiston hallintajärjestelmä,
-
järjestelmät, joissa tietty arvo voi vaihdella laajasti ja mielivaltaisen lain mukaan, ts. seurantajärjestelmät.