Mitä on mekatroniikka, mekatroniikkaelementit, moduulit, koneet ja järjestelmät
Sana "mekatroniikka" muodostuu kahdesta sanasta - "mekaniikka" ja "elektroniikka". Tätä termiä ehdotti vuonna 1969 Yaskawa Electricin vanhempi kehittäjä, japanilainen Tetsuro Mori. Yaskawa Electric erikoistui 1900-luvulla sähkökäyttöjen ja tasavirtamoottoreiden kehittämiseen ja parantamiseen ja saavutti siksi suurta menestystä tässä suunnassa, esimerkiksi ensimmäinen levy-ankkuri DC-moottori kehitettiin siellä.
Tätä seurasi ensimmäisten laitteisto-CNC-järjestelmien kehitys. Ja vuonna 1972 Mechatronics-tuotemerkki rekisteröitiin täällä. Yhtiö otti pian suuria harppauksia sähkökäyttöteknologioiden kehittämisessä. Myöhemmin yritys päätti luopua sanasta "Mechatronics" tavaramerkistä, koska termiä käytettiin laajasti sekä Japanissa että ympäri maailmaa.

Joka tapauksessa Japanissa kehitetään aktiivisinta tällaista lähestymistapaa tekniikassa, kun tuli tarpeelliseksi yhdistää mekaanisia elementtejä, sähkökoneita, tehoelektroniikkaa, mikroprosessoreita ja ohjelmistoja erittäin tarkan sähkökäyttöisen ohjauksen toteuttamiseksi.
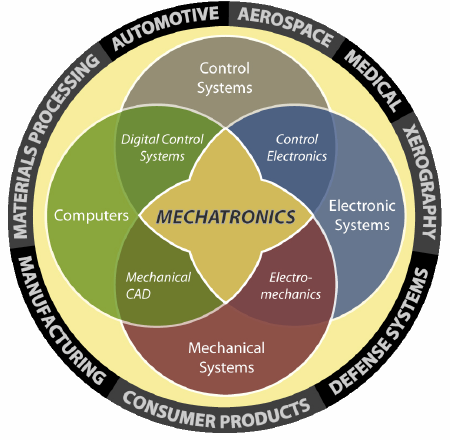
Mekatroniikan yleinen graafinen symboli on kaavio RPI:n (Rensselaer Polytechnic Institute, NY, USA) verkkosivustolta:
Mekatroniikka on yksi maailman uusimmista tekniikan aloista, joka on Unescon mukaan kymmenen lupaavimman ja halutuimman joukossa.
Yleisesti ottaen termille "mekatroniikka" voidaan antaa seuraava määritelmä – se on tieteen ja teknologian ala, joka perustuu tarkkuusmekaniikan, sähkötekniikan, elektroniikan, mikroprosessoriteknologian, eri virtalähteiden, sähkö-, hydrauliikka- ja yksiköiden systemaattiseen yhdistelmään. pneumaattiset käytöt sekä niiden älykäs ohjaus keskittyivät nykyaikaisten automatisoitujen tuotantojärjestelmien lohkojen luomiseen ja käyttöön.
Mekatroniikka on tietokoneistettua liikkeenohjausta.
Mekatroniikan tavoitteena on luoda laadullisesti uusia liikemoduuleja, mekatronisia liikemoduuleja, älykkäitä mekatroniikkamoduuleja ja niiden pohjalta liikkuvia älykkäitä koneita ja järjestelmiä.
Historiallisesti mekatroniikka kehittyi sähkömekaniikasta ja saavutuksiinsa luottaen meni pidemmälle yhdistämällä järjestelmällisesti sähkömekaanisia järjestelmiä tietokoneen ohjauslaitteisiin, sulautettuihin antureisiin ja liitäntöihin.

Kaavio mekatronisesta järjestelmästä
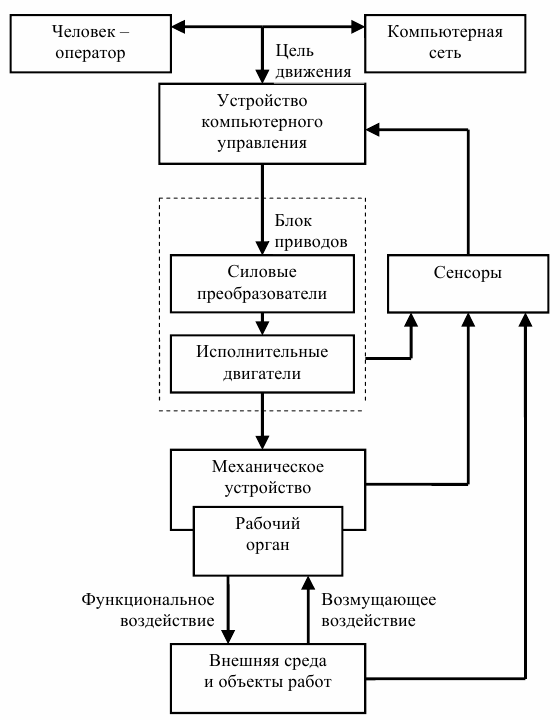
Mekatronisten järjestelmien yleinen rakenne
Elektroniset, digitaaliset, mekaaniset, sähköiset, hydrauliset, pneumaattiset ja informaatioelementit – voivat olla osa mekatronista järjestelmää, koska alun perin eri fyysisiä elementtejä yhdistetään, jotta saadaan järjestelmästä laadullisesti uusi tulos, jota ei voida saavuttaa jokaisella elementillä kuin erillisellä esiintyjällä.

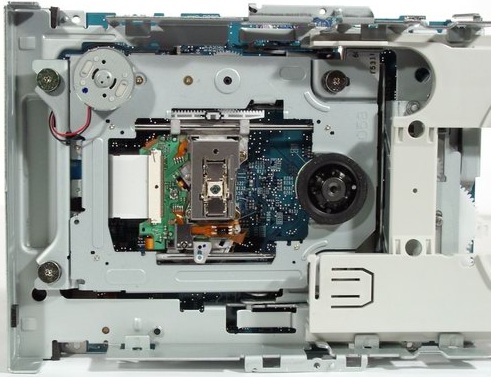
Erillinen karamoottori ei pysty poistamaan DVD-soittimen kelkkaa itsestään, mutta mikrokontrolleriohjelmistolla varustetun piirin ohjauksessa ja oikein kierukkavaihteeseen liitettynä kaikki sujuu helposti ja näyttää yksinkertaiselta monoliittijärjestelmältä. Ulkoisesta yksinkertaisuudesta huolimatta mekatroninen järjestelmä sisältää kuitenkin useita mekatronisia yksiköitä ja moduuleja, jotka on kytketty toisiinsa ja jotka ovat vuorovaikutuksessa keskenään suorittaakseen tiettyjä toiminnallisia toimia tietyn tehtävän ratkaisemiseksi.
Mekatroninen moduuli on itsenäinen tuote (rakenteellisesti ja toiminnallisesti), joka on suunniteltu suorittamaan liikkeitä tunkeutumalla ja samanaikaisesti tarkoituksenmukaisesti laitteisto- ja ohjelmistointegraatioihinsa.
Tyypillinen mekatroninen järjestelmä koostuu toisiinsa kytketyistä sähkömekaanisista ja tehokomponenteista, joita puolestaan ohjataan tietokoneella tai mikro-ohjaimilla.
Tällaista mekatronista järjestelmää suunniteltaessa ja rakentaessaan he pyrkivät välttämään tarpeettomia solmuja ja rajapintoja, yrittävät tehdä kaikesta tiivistä ja mahdollisimman saumatonta, ei vain laitteen massakoon ominaisuuksien parantamiseksi, vaan myös luotettavuuden lisäämiseksi. järjestelmästä yleensä.
Joskus se ei ole helppoa insinööreille, heidän on pakko löytää hyvin epätavallisia ratkaisuja juuri siksi, että eri yksiköt ovat erilaisissa työoloissa ja tekevät täysin eri asioita. Esimerkiksi joissain paikoissa tavanomainen laakeri ei toimi, ja se korvataan sähkömagneettisella jousituksella (tämä tehdään erityisesti turbiineissa, jotka pumppaavat kaasua putkien läpi, koska tavanomainen laakeri hajoaisi nopeasti kaasun tunkeutumisen vuoksi sen voiteluaine).
Nykyään mekatroniikka on tavalla tai toisella tunkeutunut kaikkeen kodinkoneista rakennusrobotiikkaan, aseisiin ja ilmailuon. Kaikki CNC-koneet, kovalevyt, sähkölukot, autosi ABS-järjestelmä jne. — kaikkialla mekatroniikka ei ole vain hyödyllistä, vaan myös välttämätöntä. Nykyään on harvinaista löytää manuaalista ohjausta, kaikki tiivistyy siihen, että painoit nappia ilman kiinnitystä tai yksinkertaisesti kosket anturia - sait tuloksen - tämä on ehkä alkeellisin esimerkki siitä, mitä mekatroniikka nykyään on.
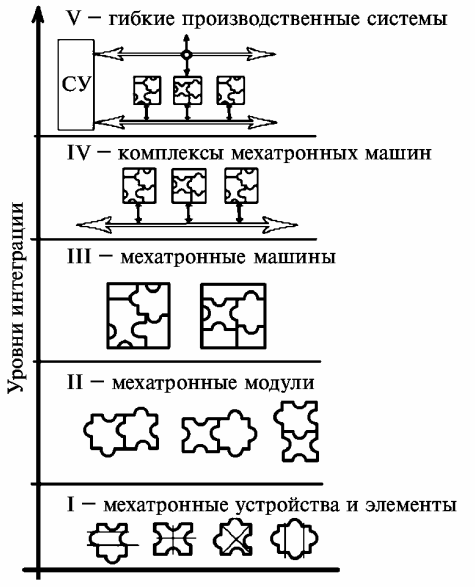
Hierarkiakaavio mekatroniikan integrointitasoista
Ensimmäisen integraation tason muodostavat mekatroniset laitteet ja niiden elementit. Integroinnin toisen tason muodostavat integroidut mekatroniikkamoduulit. Kolmannen integraation tason muodostavat integraatiomekatroniset koneet. Neljännen integraation tason muodostavat mekatronisten koneiden kompleksit. Integraation viides taso muodostuu yhdelle mekatronisten koneiden ja robottien kompleksien integraatioalustalle, mikä tarkoittaa uudelleenkonfiguroitavien joustavien tuotantojärjestelmien muodostumista.
Nykyään mekatronisia moduuleja ja järjestelmiä käytetään laajasti seuraavilla alueilla:
-
koneenrakennus ja automaatiolaitteet, teknologiset prosessit koneenrakennuksessa;
-
teollisuus- ja erikoisrobotiikka;
-
ilmailu- ja avaruusteknologia;
-
sotilasvarusteet, poliisin ja erikoispalveluiden ajoneuvot;
-
elektroniikkatekniikka ja nopeat prototyyppilaitteet;
-
autoteollisuus (moottoripyörävetomoduulit, lukkiutumattomat jarrut, automaattivaihteistot, automaattiset pysäköintijärjestelmät);
-
ei-perinteiset ajoneuvot (sähköautot, sähköpyörät, pyörätuolit);
-
toimistolaitteet (esim. kopiokoneet ja faksit);
-
tietokoneiden oheislaitteet (esim. tulostimet, piirturit, CD-ROM-asemat);
-
lääketieteelliset ja urheiluvälineet (biosähköiset ja eksoskeleton proteesit vammaisille, sävytysharjoitukset, ohjatut diagnostiset kapselit, hierontalaitteet jne.);
-
kodinkoneet (pesu-, ompelu-, astianpesukoneet, itsenäiset pölynimurit);
-
mikrokoneet (lääketieteessä, biotekniikassa, viestinnässä ja tietoliikenteessä);
-
ohjaus- ja mittauslaitteet ja koneet;
-
hissi- ja varastolaitteet, automaattiovet hotelleissa ja lentokentillä; valokuva- ja videolaitteet (videolevysoittimet, videokameroiden tarkennuslaitteet);
-
simulaattorit monimutkaisten teknisten järjestelmien käyttäjien ja lentäjien kouluttamiseen;
-
rautatieliikenne (junien ohjaus- ja vakautusjärjestelmät);
-
älykkäät koneet elintarvike-, liha- ja meijeriteollisuutta varten;
-
painokoneet;
-
älylaitteet show-teollisuuteen, nähtävyyksiin.
Vastaavasti mekatronisten teknologioiden henkilöstön tarve kasvaa.