Taajuusmuuttaja - tyypit, toimintaperiaate, kytkentäkaaviot
 Minkä tahansa sähkömoottorin roottoria käyttävät staattorikäämin sisällä pyörivän sähkömagneettisen kentän aiheuttamat voimat. Sen nopeus määräytyy yleensä sähköverkon teollisen taajuuden mukaan.
Minkä tahansa sähkömoottorin roottoria käyttävät staattorikäämin sisällä pyörivän sähkömagneettisen kentän aiheuttamat voimat. Sen nopeus määräytyy yleensä sähköverkon teollisen taajuuden mukaan.
Sen standardiarvo 50 hertsiä tarkoittaa 50 värähtelyjaksoa yhdessä sekunnissa. Yhdessä minuutissa niiden lukumäärä kasvaa 60 kertaa ja on 50×60 = 3000 kierrosta. Roottori pyörii saman määrän kertoja käytetyn sähkömagneettisen kentän vaikutuksesta.
Jos muutat staattoriin syötetyn verkkotaajuuden arvoa, voit säätää roottorin ja siihen kytketyn taajuusmuuttajan pyörimisnopeutta. Tämä periaate on sähkömoottoreiden ohjauksen perusta.
Taajuusmuuttajien tyypit
Suunnittelultaan taajuusmuuttajat ovat:
1. induktiotyyppi;
2. elektroninen.
Valmistetut asynkroniset moottorit kaavion mukaan vaiheroottorilla ja käynnistettiin generaattoritilassa, ovat ensimmäisen tyypin edustajia. Käytön aikana niillä on alhainen hyötysuhde ja niille on ominaista alhainen hyötysuhde.Siksi niitä ei ole löydetty laajasti tuotannossa, ja niitä käytetään erittäin harvoin.
Elektroninen taajuusmuunnosmenetelmä mahdollistaa sekä asynkronisten että synkronisten koneiden sujuvan nopeudensäädön. Tässä tapauksessa voidaan soveltaa toista kahdesta ohjausperiaatteesta:
1. Pyörimisnopeuden taajuudesta (V / f) riippuvuuden ennalta määrätyn ominaisuuden mukaisesti;
2. vektoriohjausmenetelmä.
Ensimmäinen menetelmä on yksinkertaisin ja vähemmän täydellinen, ja toista käytetään kriittisten teollisuuslaitteiden pyörimisnopeuksien tarkkaan ohjaamiseen.
Taajuusmuunnosvektoriohjauksen ominaisuudet
Tämän menetelmän ero on vuorovaikutus, muuntimen ohjauslaitteen vaikutus roottorikentän taajuudella pyörivän magneettivuon "avaruusvektoriin".
Tällä periaatteella toimivien muuntimien algoritmit luodaan kahdella tavalla:
1. anturiton ohjaus;
2. virtauksen säätö.
Ensimmäinen menetelmä perustuu tietyn riippuvuuden määrittämiseen sekvenssien vuorottelusta pulssinleveysmodulaatio (PWM) invertteri esiasetetuille algoritmeille. Tässä tapauksessa muuntimen lähtöjännitteen amplitudia ja taajuutta ohjataan liukuvirralla ja kuormalla, mutta ilman roottorin nopeuden takaisinkytkentää.
Tätä menetelmää käytetään ohjattaessa useita taajuusmuuttajan rinnan kytkettyjä sähkömoottoreita.Vuon ohjaus sisältää moottorin sisäisten käyttövirtojen tarkkailun niiden hajoamisen aktiivisiin ja reaktiivisiin komponentteihin sekä säätöjen tekemisen muuntimen toimintaan lähtöjännitevektorien amplitudin, taajuuden ja kulman asettamiseksi.
Tämä parantaa moottorin tarkkuutta ja lisää sen säätörajoja. Virtauksen säädön käyttö laajentaa alhaisilla nopeuksilla ja suurilla dynaamisilla kuormilla toimivien käyttölaitteiden, kuten nosturinostimien tai teollisuuden kelauskoneiden, ominaisuuksia.
Vektoritekniikan käyttö mahdollistaa dynaamisen vääntömomentin ohjauksen toteuttamisen kolmivaiheiset asynkroniset moottorit.
Vastaava piiri
Induktiomoottorin yksinkertaistettu perussähköpiiri voidaan esittää seuraavasti.
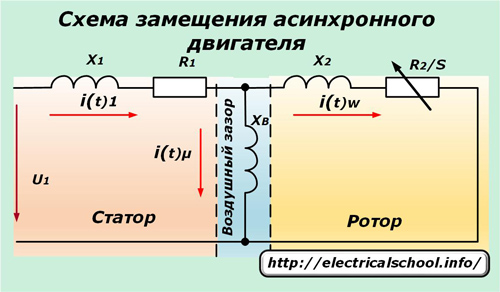
Jännite u1 syötetään staattorikäämeihin, joilla on aktiivinen resistanssi R1 ja induktiivinen vastus X1. Se, joka voittaa ilmaraon Xv resistanssin, muunnetaan roottorin käämitykseen, mikä aiheuttaa siihen virran, joka voittaa sen vastuksen.
Vektoripiirin ekvivalenttipiiri
Sen rakenne auttaa ymmärtämään induktiomoottorissa tapahtuvia prosesseja.

Staattorivirran energia on jaettu kahteen osaan:
-
iµ — virtauksen muodostava osio;
-
iw — hetkeä tuottava komponentti.
Tässä tapauksessa roottorilla on luistosta riippuva aktiivinen vastus R2 / s.
Anturittomassa ohjauksessa mitataan seuraavat:
-
jännite u1;
-
nykyinen i1.
Arvojensa mukaan he laskevat:
-
iµ — virtauksen muodostava virtauskomponentti;
-
iw — arvoa tuottava vääntömomentti.
Laskenta-algoritmi sisältää nyt induktiomoottorin elektronisen vastinpiirin virransäätimillä, joka ottaa huomioon sähkömagneettisen kentän kyllästysolosuhteet ja magneettisen energian häviöt teräksessä.
Molemmat virtavektorien komponentit, jotka ovat eri kulmia ja amplitudeja, pyörivät yhdessä roottorin koordinaattijärjestelmän kanssa ja muodostuvat kiinteäksi staattorin suuntausjärjestelmäksi.
Tämän periaatteen mukaan taajuusmuuttajan parametrit säädetään oikosulkumoottorin kuormituksen mukaan.
Taajuusmuuttajan toimintaperiaate
Tämä laite, jota kutsutaan myös invertteriksi, perustuu kaksinkertaiseen muutokseen verkkovirtalähteen aaltomuodossa.
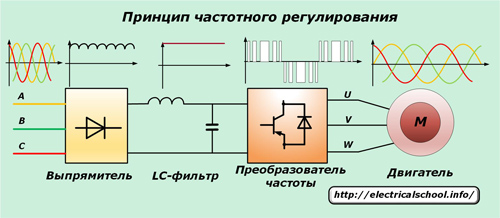
Aluksi teollisuusjännite syötetään tasasuuntaajaan, jossa on voimakkaat diodit, jotka poistavat siniaaltoharmonisia, mutta jättävät signaalin aaltoilua. Niiden poistamista varten on varustettu induktanssilla (LC-suodattimella) varustettu kondensaattoripankki, joka antaa tasasuuntaiselle jännitteelle vakaan, tasaisen muodon.
Signaali menee sitten taajuusmuuttajan tuloon, joka on kuusivaiheinen kolmivaiheinen siltapiiri tehotransistorit IGBT- tai MOSFET-sarja käänteisen napaisuuden jännitesuojadiodilla. Aikaisemmin näihin tarkoituksiin käytetyillä tyristoreilla ei ole riittävää nopeutta ja ne toimivat suurilla häiriöillä.
Moottorin "jarru"-tilan käynnistämiseksi piiriin voidaan asentaa ohjattu transistori, jossa on tehokas vastus, joka haihduttaa energiaa. Tämä tekniikka mahdollistaa moottorin tuottaman jännitteen poistamisen suodatinkondensaattorien suojaamiseksi ylilataukselta ja vaurioilta.
Muuntimen vektoritaajuusohjausmenetelmän avulla voit luoda piirejä, jotka ohjaavat automaattisesti ACS-järjestelmien signaalia. Tätä varten käytetään hallintajärjestelmää:
1. amplitudi;
2. PWM (pulssinleveyden simulointi).
Amplitudin ohjausmenetelmä perustuu tulojännitteen muuttamiseen ja PWM tehotransistorien kytkentäalgoritmiin vakiotulojännitteellä.
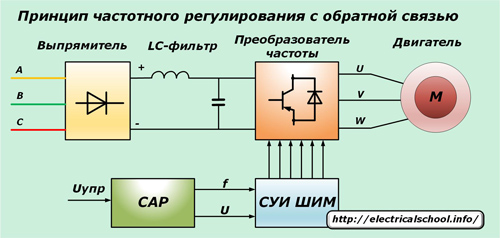
PWM-säädöllä luodaan signaalimodulaatiojakso, kun staattorin käämitys on kytketty tiukasti tasasuuntaajan positiivisiin ja negatiivisiin napoihin.
Koska generaattorin kellotaajuus on melko korkea, sähkömoottorin käämissä, jossa on induktiivinen vastus, ne tasoitetaan normaaliksi siniaalloksi.
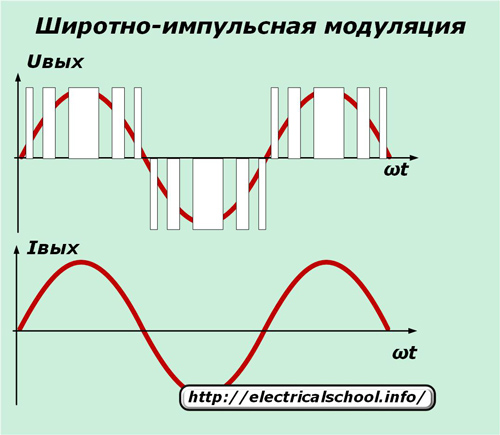
PWM-säätömenetelmät maksimoivat energiahäviöiden eliminoinnin ja tarjoavat korkean muunnostehokkuuden taajuuden ja amplitudin samanaikaisen ohjauksen ansiosta. Ne ovat tulleet saataville GTO-sarjan teholukittujen tyristorien ohjaustekniikoiden tai kaksinapaisten eristettyjen IGBT-transistoreiden tuotemerkkien kehityksen ansiosta.
Niiden sisällyttämisen periaatteet kolmivaihemoottorin ohjaamiseen on esitetty kuvassa.
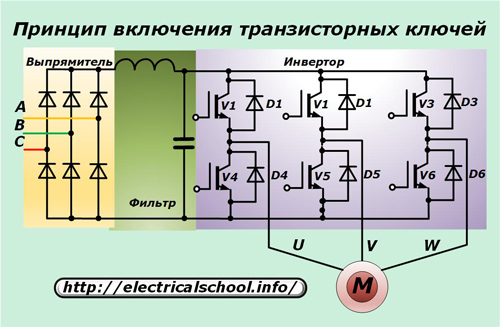
Jokainen kuudesta IGBT:stä on kytketty antirinnakkaispiiriin omaan käänteisvirtadiodiinsa. Tässä tapauksessa oikosulkumoottorin aktiivinen virta kulkee kunkin transistorin tehopiirin läpi ja sen reaktiivinen komponentti ohjataan diodien läpi.
Taajuusmuuttajan piiriin voi sisältyä ulkoisen sähköisen melun vaikutuksen eliminoimiseksi invertterin ja moottorin toimintaan. melunvaimennussuodatinselvitystila:
-
radiohäiriöt;
-
käyttölaitteiden aiheuttamia sähköpurkauksia.
Ohjain signaloi ne, ja moottorin ja invertterin lähtöliittimien välillä käytetään suojattua johdotusta iskujen vähentämiseksi.
Asynkronisten moottoreiden toiminnan tarkkuuden parantamiseksi taajuusmuuttajien ohjauspiiri sisältää:
-
tietoliikennesyöte edistyneillä liitäntäominaisuuksilla;
-
sisäänrakennettu ohjain;
-
muistikortti;
-
ohjelmisto;
-
informatiivinen LED-näyttö, joka näyttää tärkeimmät lähtöparametrit;
-
jarrukatkoja ja sisäänrakennettu EMC-suodatin;
-
piirin jäähdytysjärjestelmä, joka perustuu puhallukseen lisääntyneiden resurssien tuulettimilla;
-
moottorin lämmitys tasavirralla ja joitakin muita mahdollisuuksia.
Toiminnalliset kytkentäkaaviot
Taajuusmuuttajat on suunniteltu toimimaan yksi- tai kolmivaiheisissa verkoissa. Jos kuitenkin on teollisia tasavirtalähteitä, joiden jännite on 220 volttia, invertterit voidaan syöttää niistä.

Kolmivaiheiset mallit on suunniteltu 380 voltin verkkojännitteelle ja syöttävät sen sähkömoottoriin. Yksivaiheiset invertterit saavat virran 220 voltilla ja antavat kolme vaihetta, jotka jakautuvat ajan mukaan.
Taajuusmuuttajan kytkentäkaavio moottoriin voidaan suorittaa seuraavien kaavioiden mukaisesti:
-
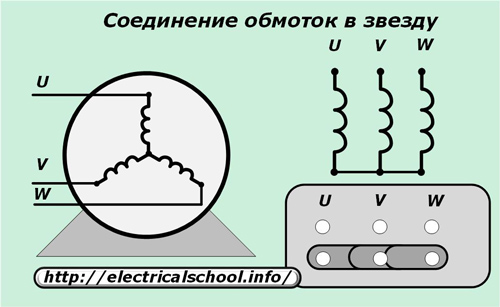
tähdet;
-
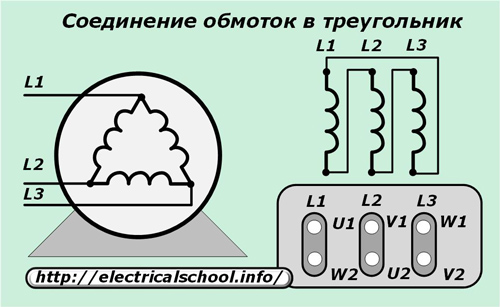
kolmio.
Moottorin käämit on koottu "tähteen" muuntimelle, jota syötetään 380 voltin kolmivaiheisella verkolla.
"Delta"-kaavion mukaan moottorin käämit kootaan, kun tehomuunnin on kytketty yksivaiheiseen 220 voltin verkkoon.
Kun valitset menetelmää sähkömoottorin kytkemiseksi taajuusmuuttajaan, sinun on kiinnitettävä huomiota tehosuhteeseen, jonka käynnissä oleva moottori voi luoda kaikissa tiloissa, mukaan lukien hidas, kuormitettu käynnistys, invertterin ominaisuuksilla.
Taajuusmuuttajaa on mahdotonta jatkuvasti ylikuormittaa, ja pieni sen lähtötehoreservi varmistaa sen pitkäaikaisen ja häiriöttömän toiminnan.