Generaattorijärjestelmä — DC-moottori
 Eri työstökoneet vaativat usein portaatonta käyttönopeuden säätöä laajemmalla alueella kuin mitä voidaan saada aikaan säätämällä magneettivuo. Tasavirtamoottori rinnakkaisvirityksellä… Näissä tapauksissa käytetään monimutkaisempia sähkökäyttöjärjestelmiä.
Eri työstökoneet vaativat usein portaatonta käyttönopeuden säätöä laajemmalla alueella kuin mitä voidaan saada aikaan säätämällä magneettivuo. Tasavirtamoottori rinnakkaisvirityksellä… Näissä tapauksissa käytetään monimutkaisempia sähkökäyttöjärjestelmiä.
Kuvassa Kuva 1 esittää kaavion säädettävästä sähkökäytöstä generaattori-moottorijärjestelmän mukaisesti (lyhenne G - D). Tässä järjestelmässä oikosulkumoottori IM pyörittää jatkuvasti itsenäisesti viritettyä DC-generaattoria G ja viritintä B, joka on rinnakkaisherätetty pienitehoinen tasavirtageneraattori.
Tasavirtamoottori D käyttää koneen työkappaletta. Generaattorin OVG ja moottorin ATS herätekäämit saavat syöttönsä virittimestä B. Muuttamalla generaattorin G magnetointipiirin resistanssia reostaatilla 1, moottorin D ankkuriin syötetty jännite muuttuu ja näin ollen moottorin nopeutta säädetään. Tässä tapauksessa moottori toimii täydellä ja vakiovirralla, koska reostaatti 2 on poistettu.
Kun jännite U muuttuu, nopeus muuttuu n0 ihanteellinen moottorin joutokäyntinopeus D. Koska moottorin vuo ja sen ankkuripiirin vastus eivät muutu, jyrkkyys b pysyy vakiona. Siksi U:n eri arvoja vastaavat suoraviivaiset mekaaniset ominaisuudet sijaitsevat toistensa alapuolella ja yhdensuuntaisesti toistensa kanssa (kuva 2).
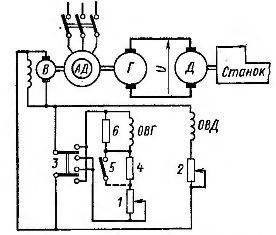
Riisi. 1. Järjestelmägeneraattori - DC-moottori (dpt)
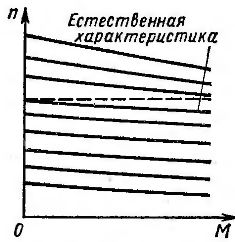
Riisi. 2. Generaattorin mekaaniset ominaisuudet — DC-moottorijärjestelmä
Niillä on suurempi kaltevuus kuin saman vakioverkosta syötetyn sähkömoottorin ominaisuudet, koska G - D -järjestelmässä jännite U generaattorin vakiovirralla laskee kuormituksen kasvaessa riippuvuuden mukaan:
missä esim. ja rg — e, vastaavasti. jne. s. ja generaattorin sisäinen vastus.
Analogisesti asynkronisten moottoreiden kanssa merkitsemme
Tämä arvo kuvaa moottorin kierrosluvun laskua, kun kuormitus kasvaa nollasta nimellisarvoon. Rinnakkaisille mekaanisille ominaisuuksille
Tämä arvo kasvaa, kun n0 pienenee. Suurilla sn-arvoilla määritellyt leikkausolosuhteet muuttuvat merkittävästi satunnaisten kuormitusvaihteluiden myötä. Siksi jännitteen säätöalue on yleensä pienempi kuin 5:1.
Kun moottoreiden nimellisteho pienenee, moottoreiden jännitehäviö kasvaa ja mekaaniset ominaisuudet muuttuvat jyrkemmiksi. Tästä syystä G -D -järjestelmän jännitteensäätöalue pienenee tehon pienentyessä (alle 1 kW tehoilla 3:1 tai 2:1).
Generaattorin magneettivuon pienentyessä sen ankkurireaktion demagnetoiva vaikutus vaikuttaa suuremmassa määrin sen jännitteeseen. Siksi alhaisiin moottorin kierrosnopeuksiin liittyvillä ominaisuuksilla on itse asiassa suurempi kaltevuus kuin mekaanisilla ominaisuuksilla.
Säätöalueen laajentaminen saavutetaan vähentämällä moottorin D magneettivuoa generaattorin täydellä virtauksella valmistetulla reostaatilla 2 (katso kuva 1. Tämä nopeudensäätötapa vastaa luonnollisen yläpuolella olevia ominaisuuksia). yksi (katso kuva 2).
Kokonaissäätöalue, joka on yhtä suuri kuin molempien menetelmien säätöalueiden tulo, on (10 - 15): 1. Jännitteensäätö on vakiomomenttisäätöä (koska moottorin magneettivuo pysyy muuttumattomana). Säätö muuttamalla moottorin D magneettivuo on jatkuva tehonsäätö.
Ennen moottorin käynnistämistä D-reostaatti 2 (katso kuva 1) poistetaan kokonaan ja moottorin vuo saavuttaa suurimman arvon. Tällöin reostaatti 1 lisää generaattorin G viritystä. Tämä saa jännitteen kasvamaan ja moottorin D nopeuden kasvamaan. Jos kela OVG kytketään välittömästi virittimen B täyteen jännitteeseen UB, siinä oleva virta, kuten missä tahansa piirissä, jossa on induktanssi ja aktiivinen vastus, kasvaa:
missä rv on virityskelan resistanssi, LB on sen induktanssi (jätä huomioimatta magneettipiirin kyllästymisen vaikutus).
Kuvassa Kuviossa 3 a (käyrä 1) esittää kaavion viritysvirran riippuvuudesta ajasta. Herätysvirta kasvaa vähitellen; kasvunopeus määräytyy suhteen mukaan

missä Tv on generaattorin herätekäämin sähkömagneettinen aikavakio; sillä on ajan ulottuvuus.
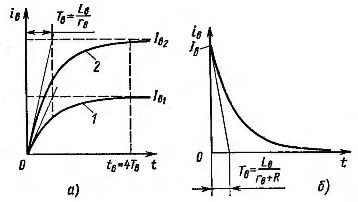
Riisi. 3. G-D-järjestelmän herätevirran muuttaminen
Generaattorin jännitteen muutoksella käynnistyksen yhteydessä on suunnilleen sama luonne kuin viritysvirran muutoksella. Tämä mahdollistaa moottorin käynnistymisen automaattisesti, kun reostaatti 1 on poistettu (katso kuva 1).
Generaattorin viritysvirran nousua kiihdytetään (pakotetaan) usein kohdistamalla virityskäämiin alkuhetkellä nimellisarvon ylittävä jännite, jonka jälkeen herätteen lisäys jatkuu käyrällä 2 (ks. kuva 3, a). ). Kun käämin virta saavuttaa arvon Iv1, joka on yhtä suuri kuin tasatilan viritysvirta nimellisjännitteellä, virityskelan jännite pienenee nimellisarvoon. Herätysvirran nousuaika nimellisarvoon pienenee.
Generaattorin virityksen pakottamiseksi valitaan herätejännite V (katso kuva 1) 2-3 kertaa korkeammaksi kuin generaattorin herätekäämin nimellisjännite ja piiriin viedään lisävastus 4. …
Generaattori-moottorijärjestelmä mahdollistaa regeneratiivisen jarrutuksen. Pysäyttämiseksi on välttämätöntä, että ankkurin virran muuttaa suuntaa. Vääntömomentti muuttaa myös merkkiä ja ajon sijaan se muuttuu jarrutukseksi. Pysähtyminen tapahtuu, kun moottorin reostaatin 2 magneettivuo kasvaa tai generaattorin jännite laskee reostaatin 1 kanssa. Molemmissa tapauksissa esim. jne. c. Moottorin E tulee korkeammaksi kuin generaattorin jännite U.Tässä tapauksessa moottori D toimii generaattoritilassa ja pyörii liikkuvien massojen kineettisellä energialla ja generaattori G toimii moottoritilassa pyörittäen pikaviestikonetta supersynkronisella nopeudella, joka samalla siirtyy generaattoritilaan ja syöttää verkkoon virtaa.
Regeneroiva jarrutus voidaan tehdä vaikuttamatta reostaatteihin 1 ja 2. Voit yksinkertaisesti avata generaattorin herätepiirin (esim. kytkin 3). Tässä tapauksessa virta suljetussa piirissä, joka koostuu generaattorin ja vastuksen 6 herätekäämistä, pienenee vähitellen
jossa R on vastuksen 6 resistanssi.
Tätä yhtälöä vastaava kaavio on esitetty kuvassa. 3, b. Generaattorin viritysvirran asteittainen lasku vastaa tässä tapauksessa reostaatin 1 resistanssin lisäystä (katso kuva 1) ja aiheuttaa regeneratiivisen jarrutuksen. Tässä piirissä generaattorin virityskäämin rinnan kytketty vastus 6 on purkausvastus. Se suojaa virityskäämin eristystä vaurioilta herätepiirin äkillisen hätäkatkon sattuessa.
Kun herätepiiri katkeaa, koneen magneettivuo pienenee jyrkästi, indusoi e:n virityskelan kierroksissa. jne. c. itseinduktanssi on niin suuri, että se voi aiheuttaa käämin eristyksen rikkoutumisen. Purkausvastus 6 muodostaa piirin, jossa mm. jne. c. kenttäkäämin itseinduktio indusoi virran, joka hidastaa magneettivuon vähenemistä.
Jännitteen pudotus purkausvastuksen yli on yhtä suuri kuin kenttäkelan yli oleva jännite.Mitä pienempi purkausvastuksen arvo on, sitä pienempi on virityskäämin jännite, kun piiri katkeaa. Samanaikaisesti purkausvastuksen resistanssiarvon pienentyessä sen läpi jatkuvasti kulkeva virta normaalitilassa ja siinä olevat häviöt kasvavat. Molemmat ehdot on otettava huomioon purkausvastusarvoa valittaessa.
Kun generaattorin virityskäämi on kytketty pois päältä, sen liittimiin jää pieni jännite jäännösmagnetismin vuoksi. Tämä voi saada moottorin pyörimään hitaasti ns. ryömintänopeudella. Tämän ilmiön poistamiseksi generaattorin virityskäämi kytketään sen jälkeen, kun se on irrotettu herättimestä, generaattorin napoihin siten, että jäännösmagnetismista tuleva jännite aiheuttaa demagnetoivan virran generaattorin virityskäämiin.
Sähkömoottorin D kääntämiseksi virran suuntaa generaattorin OVG G herätekelassa muutetaan kytkimellä 3 (tai muulla vastaavalla laitteella). Kelan merkittävän induktanssin vuoksi viritysvirta pienenee vähitellen, muuttaa suuntaa ja sitten vähitellen kasvaa.
Tarkasteltavana olevan järjestelmän moottorin käynnistys-, pysäytys- ja suunnanvaihtoprosessit ovat erittäin taloudellisia, koska ne suoritetaan ilman ankkuriin sisältyviä reostaatteja. Moottori käynnistetään ja hidastetaan kevyellä ja kompaktilla laitteistolla, joka ohjaa vain pieniä kenttävirtoja. Siksi tätä "generaattori - DC-moottori" -järjestelmää suositellaan käytettäväksi töissä, joissa on usein käynnistykset, jarrut ja peruutukset.
Moottori-generaattori-DC-järjestelmän tärkeimmät haitat ovat suhteellisen alhainen hyötysuhde, korkeat kustannukset ja hankalia, koska järjestelmässä on suuri määrä sähkökoneita. Järjestelmän hinta ylittää samalla teholla olevan asynkronisen oravahäkkimoottorin hinnan 8-10 kertaa. Lisäksi sellaisia sähköinen käyttöjärjestelmä vaatii paljon tilaa.