Sähkömoottorin toimintaperiaate ja laite
Mikä tahansa sähkömoottori on suunniteltu suorittamaan mekaanista työtä siihen kohdistetun sähkön kulutuksen vuoksi, joka yleensä muunnetaan pyöriväksi liikkeeksi. Vaikka tekniikassa on malleja, jotka luovat välittömästi työkappaleen translaatioliikkeen. Näitä kutsutaan lineaarimoottoreiksi.
Teollisuusasennuksissa sähkömoottorit käyttävät erilaisia metallinleikkauskoneita ja teknologiseen tuotantoprosessiin osallistuvia mekaanisia laitteita.
Kodinkoneiden sisällä sähkömoottorit käyttävät pesukoneita, pölynimureita, tietokoneita, hiustenkuivaajia, lasten leluja, kelloja ja monia muita laitteita.

Fyysiset perusprosessit ja toimintaperiaate
Sisään liikuttaessa magneettikenttä sähkövarauksilla, joita kutsutaan sähkövirroiksi, on aina mekaaninen voima, joka pyrkii kääntämään niiden suuntaa tasossa, joka on kohtisuorassa magneettikenttälinjojen suuntausta vastaan.Kun sähkövirta kulkee metallilangan tai siitä tehdyn käämin läpi, tämä voima pyrkii liikuttamaan/pyörimään jokaista virtaa kuljettavaa lankaa ja koko käämiä kokonaisuudessaan.
Alla olevassa kuvassa näkyy metallikehys, jonka läpi virtaa virta. Siihen kohdistettu magneettikenttä luo voiman F kehyksen jokaiselle haaralle, mikä saa aikaan pyörivän liikkeen.

Tämä sähköisen ja magneettisen energian vuorovaikutuksen ominaisuus, joka perustuu sähkömotorisen voiman luomiseen suljetussa johtavassa silmukassa, otetaan käyttöön jokaisessa sähkömoottorissa. Sen suunnittelu sisältää:
-
kela, jonka läpi virtaa sähkövirta. Se asetetaan erityiseen ankkuriytimeen ja kiinnitetään pyöriviin laakereihin kitkavoimien vastustuskyvyn vähentämiseksi. Tätä mallia kutsutaan roottoriksi;
-
staattori, joka luo magneettikentän, joka voimalinjoillaan tunkeutuu roottorin käämin kierroksia pitkin kulkeviin sähkövarauksiin;
-
kotelo staattorin sijoittamista varten. Rungon sisällä valmistetaan erityisiä istuimia, joiden sisään on asennettu roottorin laakereiden ulkokehät.
Yksinkertaisimman sähkömoottorin yksinkertaistettu rakenne voidaan esittää seuraavan muodon kuvalla.

Roottorin pyöriessä syntyy vääntömomentti, jonka teho riippuu laitteen yleisestä rakenteesta, käytetyn sähköenergian määrästä ja sen häviöistä muunnoksissa.
Moottorin suurimman mahdollisen momenttitehon suuruus on aina pienempi kuin siihen kohdistettu sähköenergia. Sille on ominaista tehokkuusarvo.
Sähkömoottorien tyypit
Kelojen läpi kulkevan virran tyypin mukaan ne jaetaan DC- tai AC-moottoreihin.Kummassakin näistä kahdesta ryhmästä on suuri määrä muunnoksia käyttämällä erilaisia teknologisia prosesseja.
DC moottorit
Niissä on kiinteän kiinteän staattorin luoma magneettikenttä kestomagneetit tai erityiset sähkömagneetit virityskeloilla. Ankkurikela on kiinnitetty tukevasti laakereihin kiinnitettyyn akseliin, joka voi pyöriä vapaasti oman akselinsa ympäri.
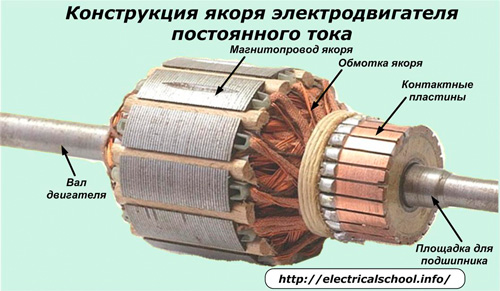
Tällaisen moottorin perusrakenne on esitetty kuvassa.

Ankkurin ferromagneettisista materiaaleista tehdyssä ytimessä on käämi, joka koostuu kahdesta sarjaan kytketystä osasta, jotka on liitetty johtaviin kollektorilevyihin toisesta päästään ja toisesta päästään toisiinsa. Kaksi grafiittiharjaa on sijoitettu ankkurin diametraalisesti vastakkaisiin päihin ja ne painetaan keräyslevyjen kosketuslevyjä vasten.
Positiivinen DC-lähdepotentiaali syötetään alempaan kuviosiveltimeen ja negatiivinen potentiaali ylempään. Kelan läpi kulkevan virran suunta on merkitty katkoviivalla punaisella nuolella.
Virta saa aikaan magneettikentän pohjoisnavan ankkurin vasemmassa alakulmassa ja etelänapan ankkurin oikeassa yläkulmassa (gimbal-sääntö). Tämä johtaa roottorin napojen syrjäyttämiseen samannimistä kiinteistä napoista ja vetovoimasta staattorin vastakkaisiin napoihin. Käytetyn voiman seurauksena tapahtuu pyörimisliike, jonka suunta on osoitettu ruskealla nuolella.
Kun ankkuria pyöritetään edelleen inertialla, navat siirretään muille keräinlevyille. Virran suunta niissä on päinvastainen. Roottori jatkaa pyörimistään.
Tällaisen keräinlaitteen yksinkertainen rakenne johtaa suuriin sähköenergian hävikkiin.Tällaiset moottorit toimivat yksinkertaisissa laitteissa tai lasten leluissa.
Tuotantoprosessiin osallistuvilla tasavirtasähkömoottoreilla on monimutkaisempi rakenne:
-
kela ei ole jaettu kahteen, vaan useisiin osiin;
-
jokainen kelan osa on asennettu omaan napaansa;
-
kollektorilaite valmistetaan tietyllä määrällä kosketuslevyjä käämien lukumäärän mukaan.
Tuloksena syntyy tasainen liitos jokaisen navan kosketuslevyjen kautta harjoihin ja virtalähteeseen ja energiahäviöt vähenevät.
Tällaisen ankkurin laite näkyy kuvassa.
DC-moottoreissa roottorin pyörimissuunta voidaan vaihtaa. Tätä varten riittää, kun muutat virran liikettä kelassa päinvastaiseksi muuttamalla napaisuutta lähteessä.
AC moottorit
Ne eroavat aikaisemmista malleista siinä, että niiden kelassa kulkevaa sähkövirtaa kuvataan siniaaltoharmoninen lakimuuttaa ajoittain sen suuntaa (merkki). Niiden tehostamiseksi jännite syötetään generaattoreista, joissa on vuorottelevat merkit.
Tällaisten moottoreiden staattori suoritetaan magneettipiirillä. Se on valmistettu ferromagneettisista levyistä, joissa on uria, joihin kelan kierrokset on sijoitettu kehyksellä (kela).

Synkroniset sähkömoottorit
Alla olevassa kuvassa näkyy yksivaiheisen vaihtovirtamoottorin toimintaperiaate, jossa roottorin ja staattorin sähkömagneettiset kentät pyörivät synkronisesti.

Staattorin magneettipiirin uriin diametraalisesti vastakkaisiin päihin sijoitetaan käämijohdot, jotka on esitetty kaavamaisesti kehyksen muodossa, jonka läpi vaihtovirta kulkee.
Tarkastellaan tapausta ajanhetkellä, joka vastaa sen puoliaallon positiivisen osan kulkua.
Laakerikennoissa pyörii vapaasti sisäänrakennetulla kestomagneetilla varustettu roottori, jossa navan pohjoinen «N-suu» ja eteläinen «S-suu» on selkeästi rajattu. Kun positiivinen puoliaalto virtaa kulkee staattorikäämin läpi, syntyy siihen magneettikenttä, jonka navat «S st» ja «N st».
Roottorin ja staattorin magneettikenttien välillä syntyy vuorovaikutusvoimia (napojen hylkiessä ja toisin kuin navat vetävässä), jotka pyrkivät kääntämään moottorin ankkurin mistä tahansa asennosta ääriasentoon, kun vastakkaiset navat sijaitsevat mahdollisimman lähellä toisiaan toinen.
Jos tarkastelemme samaa tapausta, mutta sillä hetkellä, kun päinvastainen - negatiivinen puoliaalto virtaa kulkee runkolangan läpi, niin ankkurin pyöriminen tapahtuu vastakkaiseen suuntaan.
Roottorin jatkuvan liikkeen varmistamiseksi staattorissa ei tehdä yhtä käämikehystä, vaan tietty määrä niitä, koska jokainen niistä saa virtansa erillisestä virtalähteestä.
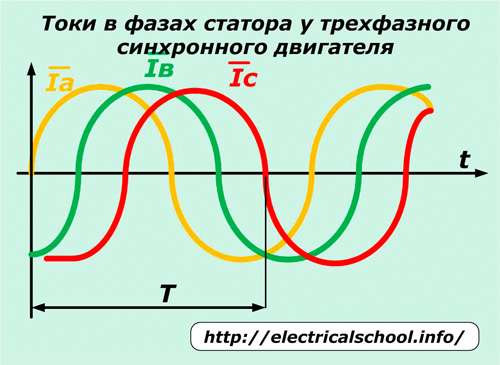
Synkronisesti pyörivän kolmivaiheisen vaihtovirtamoottorin toimintaperiaate, roottorin ja staattorin sähkömagneettiset kentät on esitetty seuraavassa kuvassa.

Tässä mallissa kolme kelaa A, B ja C on asennettu staattorin magneettipiirin sisään 120 asteen kulmilla toisiinsa nähden. Kela A on merkitty keltaisella, B on vihreä ja C on punainen. Jokainen kela on tehty samoilla kehyksillä kuin edellisessä tapauksessa.
Kuvassa virta kulkee joka tapauksessa vain yhden kelan läpi eteen- tai taaksepäin, mikä on ilmaistu merkeillä «+» ja «-«.
Kun positiivinen puoliaalto kulkee vaiheen A läpi eteenpäin, roottorikentän akseli siirtyy vaaka-asentoon, koska staattorin magneettiset navat muodostuvat tässä tasossa ja vetävät puoleensa liikkuvaa ankkuria. Roottorin vastakkaisilla navoilla on tapana lähestyä staattorin napoja.
Kun positiivinen puoliaalto siirtyy vaiheeseen C, ankkuri pyörii 60 astetta myötäpäivään. Kun virta on kytketty vaiheeseen B, tapahtuu samanlainen ankkurin pyöriminen. Jokainen seuraava virta seuraavan käämin seuraavassa vaiheessa kääntää roottoria.
Jos jokaiseen käämiin kohdistetaan 120 asteen kulmassa siirretty kolmivaiheinen verkkojännite, niissä kiertää vaihtovirtaa, joka pyörittää ankkuria ja luo sen synkronisen pyörimisen käytetyn sähkömagneettisen kentän kanssa.
Samaa mekaanista rakennetta käytetään menestyksekkäästi kolmivaiheisessa askelmoottorissa… Vain jokaisessa käämissä ohjauksella erikoisohjain (askelmoottoriohjain) Vakiopulssit syötetään ja poistetaan yllä kuvatun algoritmin mukaisesti.
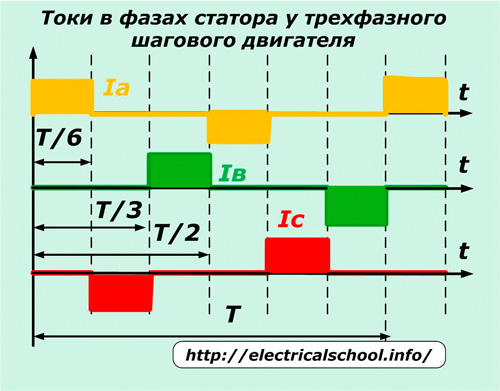
Niiden käynnistys käynnistää pyörimisliikkeen, ja niiden päättyminen tietyllä hetkellä antaa mitatun akselin pyörimisen ja pysäytyksen ohjelmoidussa kulmassa tiettyjen teknisten toimintojen suorittamiseksi.
Molemmissa kuvatuissa kolmivaiheisissa järjestelmissä on mahdollista muuttaa ankkurin pyörimissuuntaa. Tätä varten sinun tarvitsee vain vaihtaa vaiheiden sarja «A» — «B» — «C» toiseen, esimerkiksi «A» — «C» — «B».
Roottorin nopeutta säätelee jakson T pituus. Sen pienentäminen johtaa pyörimisen kiihtyvyyteen.Vaiheen virran amplitudin suuruus riippuu käämin sisäisestä resistanssista ja siihen syötetyn jännitteen arvosta. Se määrittää sähkömoottorin vääntömomentin ja tehon.
Asynkroniset moottorit
Näissä moottorimalleissa on sama staattorin magneettipiiri käämeillä kuin aiemmin käsitellyissä yksivaiheisissa ja kolmivaiheisissa malleissa. Ne ovat saaneet nimensä ankkurin ja staattorin sähkömagneettisten kenttien asynkronisesta pyörimisestä. Tämä tehdään parantamalla roottorin kokoonpanoa.
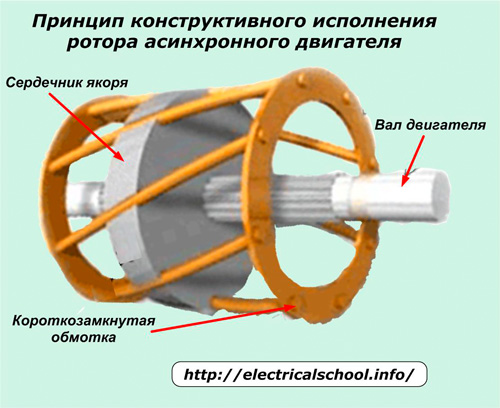
Sen ydin on valmistettu uritetuista sähköteräslevyistä. Ne on varustettu alumiini- tai kuparivirtajohtimilla, jotka suljetaan ankkurin päistä johtavilla renkailla.
Kun staattorin käämeihin syötetään jännite, roottorin käämiin indusoituu sähkömoottori sähkövoimalla ja syntyy ankkurin magneettikenttä. Kun nämä sähkömagneettiset kentät ovat vuorovaikutuksessa, moottorin akseli alkaa pyöriä.
Tällä rakenteella roottorin liike on mahdollista vasta pyörivän sähkömagneettisen kentän esiintymisen jälkeen staattorissa, ja se jatkuu sen kanssa asynkronisessa toimintatilassa.
Asynkroniset moottorit ovat rakenteeltaan yksinkertaisempia, joten ne ovat halvempia ja niitä käytetään laajalti teollisuusasennuksissa ja kodinkoneissa.

ABB:n räjähdyssuojattu sähkömoottori
Lineaarimoottorit
Monet teollisten mekanismien työkappaleet suorittavat edestakaisin tai siirtyvän liikkeen yhdessä tasossa, mikä on tarpeen metallintyöstökoneiden, ajoneuvojen, vasaran iskujen toiminnan kannalta paalujen ajettaessa ...
Tällaisen työkappaleen siirtäminen pyörivästä sähkömoottorista vaihdelaatikoiden, kuularuuvien, hihnakäyttöjen ja vastaavien mekaanisten laitteiden avulla vaikeuttaa suunnittelua. Nykyaikainen tekninen ratkaisu tähän ongelmaan on lineaarisen sähkömoottorin toiminta.
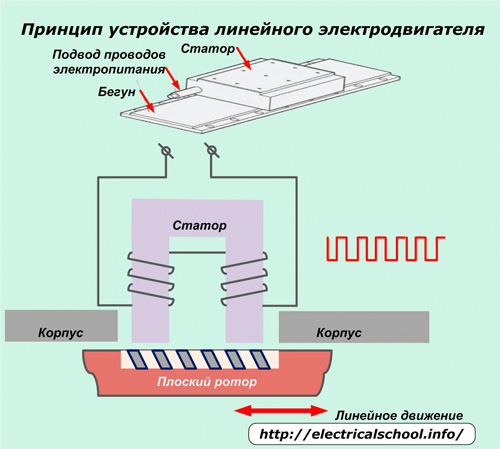
Sen staattori ja roottori ovat pitkänomaisia nauhojen muodossa sen sijaan, että ne olisivat kierretty renkaisiin, kuten pyörivissä sähkömoottoreissa.
Toimintaperiaate on antaa kanavaroottorille edestakainen lineaarinen liike johtuen sähkömagneettisen energian siirrosta kiinteästä staattorista, jossa on tietynpituinen avoin magneettipiiri. Sen sisään syntyy toimiva magneettikenttä kytkemällä virta peräkkäin.
Se vaikuttaa ankkurikäämiin kollektorilla. Tällaisessa moottorissa syntyvät voimat liikuttavat roottoria vain lineaarisessa suunnassa ohjauselementtejä pitkin.
Lineaarimoottorit on suunniteltu toimimaan joko tasa- tai vaihtovirralla ja ne voivat toimia synkronisessa tai asynkronisessa tilassa.
Lineaarimoottorien haitat ovat:
-
tekniikan monimutkaisuus;
-
korkea hinta;
-
alhainen energiatehokkuus.