Induktiomoottorin kulmanopeuden säätö muuttamalla staattorin napaparien lukumäärää
 Kun napaparien lukumäärä kasvaa, kentän kulmanopeus pienenee, jolloin myös oikosulkumoottorin roottorin nopeus pienenee. Erikoispainos kaksinopeuksiset asynkroniset moottorit, jonka staattorikäämit koostuvat erillisistä osista. Ne voidaan yhdistää uudelleen kahdella eri tavalla: tähti ja kaksoistähti (kuva 1, a, b) tai kolmio ja kaksoistähti (kuva 1, b, d).
Kun napaparien lukumäärä kasvaa, kentän kulmanopeus pienenee, jolloin myös oikosulkumoottorin roottorin nopeus pienenee. Erikoispainos kaksinopeuksiset asynkroniset moottorit, jonka staattorikäämit koostuvat erillisistä osista. Ne voidaan yhdistää uudelleen kahdella eri tavalla: tähti ja kaksoistähti (kuva 1, a, b) tai kolmio ja kaksoistähti (kuva 1, b, d).
Kaksoistähdessä kentän nopeus on aina kaksinkertainen tähden tai kolmion nopeus. Nämä kytkimet eivät kuitenkaan ole samanarvoisia. Tosiasia on, että suurin sallittu vääntömomentti jatkuvan käytön aikana määräytyy suurimman sallitun vaihevirran mukaan käämien lämmitysolosuhteiden mukaan ja riippuu staattorin vuosta, joka on verrannollinen vaihejännitteen neliöön. Samoista arvoista riippuu myös pitkäaikainen sallittu teho.
Jos vaihdat moottorin käämit tähdestä kaksoistähteen, vaihejännite ei muutu, ja kun vaihdat kolmiosta kaksoistähteen, se pienenee √3 kertaa. Mutta kaksoistähdellä kunkin vaiheen virta voi olla kaksi kertaa suurempi kuin tähdessä tai kolmiossa, koska jokainen vaihe koostuu kahdesta rinnakkaisesta haarasta. Sitten havaitaan, että tähdestä kaksoistähdeksi siirtyessä nopeus ja teho kaksinkertaistuvat, joten kriittinen momentti pysyy vakiona (M = P /ω= const).
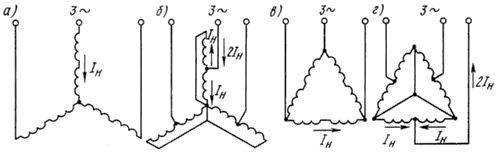
Riisi. 1. Kaaviot asynkronisen moottorin staattorikäämien kytkemiseksi tähtiin (a) ja kaksoistähteen (b), kolmioon (c) ja kaksoistähteen (d)
Jos siirryt kolmiosta kaksoistähteen, vaihejännite pienenee √3 kertaa. Silloin teho kasvaa jopa kaksivaiheisella virralla vain 2 /√3 = l, 18 kertaa ja sitä voidaan pitää ennallaan. Tässä tapauksessa, kun kulmanopeus kasvaa kertoimella kaksi, teho melkein muuttuu ja momentti pienenee noin kertoimella kaksi. Siksi on suositeltavaa käyttää moottoreita nostolaitteiden ohjaamiseen, joiden käämitykset on kytketty tähtiin, ja metallinleikkauskoneiden ajamiseen, moottoreiden, joiden staattorikäämit on kytketty kolmioon.

Riisi. 2. Moninopeuksisen moottorin passitiedot
On olemassa asynkronisia sähkömoottoreita, joissa on kaksi toisistaan eristettyä staattorikäämitystä, joista toinen on ilman kytkentää ja toinen kytkentänapoilla. Sen jälkeen saadaan kolmivaihteiset moottorit. Jos molemmat käämit ovat napavaihdettuja, moottorit ovat nelivaiheisia. Joissakin tapauksissa käytetään kahta eristettyä käämiä, joissa on eri määrä napapareja. pp ilman vaihtoa.Esimerkiksi hissien moottoreissa p1 = 3 ja p2 = 12, mikä vastaa synkronista pyörimisnopeutta 1000 ja 250 rpm.
Kuvassa Kuvio 3a esittää mekaaniset ominaisuudet kaksinopeuksiselle tähti-kaksitähti-moottorille, ja kuvio 3a. 3, b - vaihdettaessa kolmiosta kaksoistähdeksi.
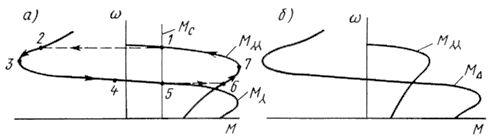
Riisi. 3... Asynkronisten sähkömoottorien mekaaniset ominaisuudet vaihdettaessa tähtitähteestä kaksoistähteen (a) ja kolmiosta kaksoistähteen (b)
Jos vaihdat nopeasti suuremmasta nopeudesta pienemmälle, moottori käy jonkin aikaa. jousitustila… Itse asiassa, jos kentän nopeus pienenee, niin ensimmäisellä hetkellä roottori jatkaa pyörimistä samalla nopeudella.
Moottori vaihtaa välittömästi ominaisuudesta toiseen, ts. pisteestä 1 pisteeseen 2 (kuva 3, a). Seuraa regeneratiivista jarrutusta (kohdat 2, 3, 4), pisteessä 5 se alkaa toimia tasaisessa tilassa. Jos vaihdat pienemmästä nopeudesta suurempaan, moottori siirtyy välittömästi pisteestä 5 pisteeseen b, sitten seuraa kiihtyvyys (pisteet 6 ja 7) ja pisteessä 1 ilmaantuu jälleen tasapainotila.