Tyristorimuuntimien haitat
Tällä hetkellä DC-moottorimuuntimien päätyyppi on puolijohdetyristori.
Tyristorien haittoja ovat seuraavat:
1. Yksipuolinen johtuminen, jonka seurauksena on tarpeen kaksinkertaistaa laitteiden lukumäärä.
2. Pieni ylikuormitusvirta sekä virran nousunopeuden rajoittaminen.
3. Ylijänniteherkkyys.

Tasasuunnatun jännitteen keskiarvo ilman säätöä määräytyy pääasiassa tyristorimuuntimen kytkentäpiirin mukaan. Muunnospiirit on jaettu kahteen luokkaan: nollapääte ja silta. Keski- ja suuritehoisissa asennuksissa käytetään pääasiassa siltamuunninpiirejä, mikä johtuu pääasiassa kahdesta syystä:
-
kunkin tyristorin pienempi jännite,
-
muuntajan käämien läpi virtaavan virran vakiokomponentin puuttuminen.
Muuntajapiirit voivat vaihdella myös vaiheiden lukumäärän suhteen: yhdestä pienitehoisissa asennuksissa 12-24:ään suuritehoisissa muuntimissa.

Kaikilla tyristorimuuntimien muunnelmilla sekä positiivisilla ominaisuuksilla, kuten alhainen inertia, pyörivien elementtien puute, pienemmät (sähkömekaanisiin muuntimiin verrattuna) koot, on useita haittoja:
1. Kova verkkoliitäntä: kaikki verkkojännitteen vaihtelut välittyvät suoraan käyttöjärjestelmään, ja moottorin akseleiden kuormituspiikit välittyvät välittömästi verkkoon ja aiheuttavat virtapiikkejä.
2. Pieni tehokerroin, kun jännitettä säädetään alas.
3. Korkeampien harmonisten syntyminen, sähköverkon kuormitus.
Tyristoreiden ja yleensä muuntimen yksinapaisen johtavuuden yhteydessä moottorin kääntäminen yksinkertaisimmassa piirissä yhden muuntimen läsnäollessa voidaan tehdä vain kytkemällä ankkuri tai herätekäämi sopivilla kontaktoreilla. Luonnollisesti tässä tilanteessa sähkökonejärjestelmän toiminta on epätyydyttävä, koska on tarpeen kytkeä joko suuria virtoja tai korkean induktanssin piiriä. Siksi käytetään yleensä kahta muuntajaa, joista jokainen on suunniteltu toimimaan yhdessä pyörimissuunnassa.

Tyristorikäytön tekniset ja taloudelliset indikaattorit: nopeuden säätöalue, mahdollisuus yhden tai toisen jarrutus-, peruutus-, mekaanisten ominaisuuksien tyyppi ja muut ovat suurelta osin virransyöttöjärjestelmän määräämiä.
Kaikki pää- (teho)piirien kaaviot voidaan vähentää neljään päävaihtoehtoon:
1. DC-moottorin ankkurisyöttö yhdestä ohjatusta muuntimesta.Tämä ja seuraavat kaaviot piirustuksen yksinkertaistamiseksi ja perustavanlaatuisten erojen tunnistamiseksi on annettu oletuksena syöttö yksivaiheisesta vaihtovirtaverkosta.
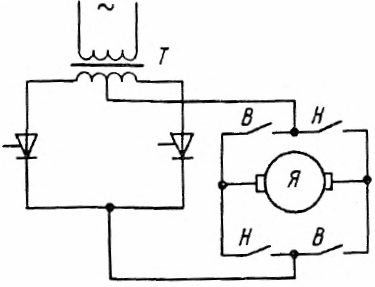
Ohjattu muuntaja-moottorijärjestelmä, jossa yksi tyristorimuuntaja ankkuripiirissä, V, N - kontaktorit eteen- ja taaksepäin pyörimiseen
Tässä tapauksessa nopeuden säätö saadaan aikaan vain muuttamalla moottorin ankkuriin syötettyä jännitettä; moottorin suunnanvaihto — muuttamalla ankkurivirran suuntaa kontaktoreilla. Jarrutus on sähködynaamista.
Kääntökontaktorien läsnäolo ankkuripiirissä tekee asennuksesta kalliimpaa, varsinkin suurella moottoriteholla, ja tekee siitä myös sopivan vain mekanismeihin, jotka eivät vaadi toistuvia käännöksiä ja pysäytyksiä. Piiri ei tarjoa regeneratiivista jarrutuskykyä.
2. Moottorin ankkurin syöttö kahdesta ristiin kytketystä muuntimesta. Yhdessä pyörimissuunnassa toinen invertteri toimii, toisessa - toinen Päinvastainen saavutetaan ohjaamalla tyristoreita ja varmistetaan siirtämällä toinen muuntimista invertteritilaan.
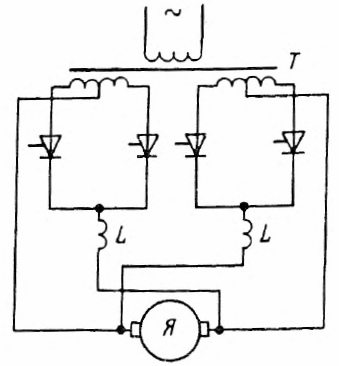 Ohjattu invertteri-moottorijärjestelmä, jossa kaksi vaihtosuuntaajaa on kytketty ristiin
Ohjattu invertteri-moottorijärjestelmä, jossa kaksi vaihtosuuntaajaa on kytketty ristiin
Piiri ei vaadi suuria peruutuskontaktoreita ankkuripiirissä, se tarjoaa tasaisen ja luotettavan energian talteenoton pysäytyksen ja sitä käytetään yleensä toistuvaan suunnanvaihtoon.
Piirin haittana on monimutkaisuus ja korkeat kustannukset, jotka johtuvat tarpeesta saada kaksinkertainen tyristoreiden sarja ja kaksinkertainen määrä tehomuuntajan toisiokäämiä.
3. Muuntajien rinnakkaiskytkentä. Kaavan ominaisuudet ovat samanlaiset kuin edellisessä.Etuna on vähemmän tehomuuntajan toisiokäämiä.
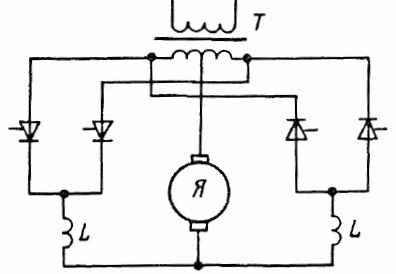
Ohjattu invertteri-moottorijärjestelmä, jossa muuntimet rinnakkaisliitännöillä
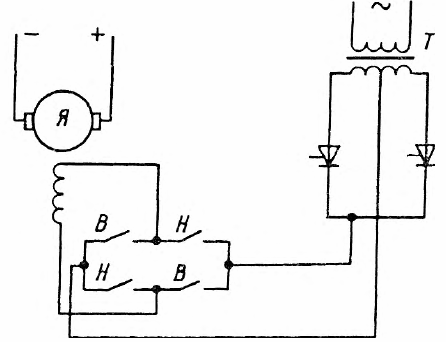
Muuntaja-moottorijärjestelmä, jossa ohjattu muuntaja moottorin herätepiirissä
Laite toimii tasaisella ja riittävän korkealla tehokertoimella. Sitä vastoin muuttamalla virityspiirin virran suuntaa se kiristää transientteja. Järjestelmä ei sovellu kovinkaan mekanismeihin, jotka vaativat suuren määrän peruutuksia ja pysäytyksiä.