Induktiivisten lähestymiskytkimien toimintaperiaate, lajikkeet ja esimerkkejä niiden käytöstä
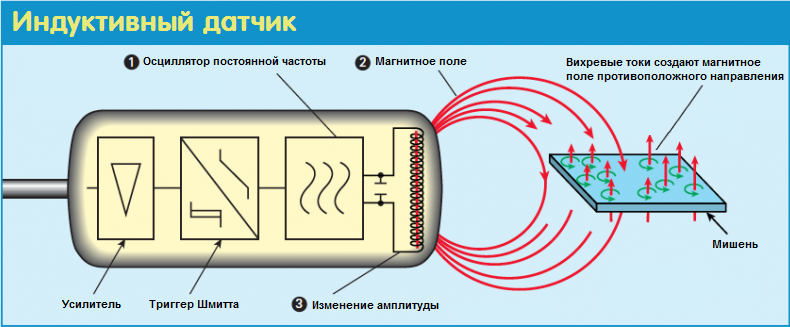
Kontaktittomia induktiivisia kytkimiä (läheisyysantureita) käytetään kohteiden automaattiseen kosketuksettomaan havaitsemiseen erilaisissa teollisissa tarkoituksiin. Niiden toimintaperiaate perustuu generaattorin värähtelyamplitudin muutokseen, joka liittyy tietyn kokoisen ferromagneettisen, magneettisen tai metallisen esineen tuomiseen anturin työalueelle.
Kun anturi kytketään päälle, sen työskentelyalueella toimii vaihtuva magneettikenttä, ja jos nyt metallia viedään tälle alueelle, kohteet ohjataan tähän metalliin pyörrevirrat aiheuttaa muutoksen generaattorin alkuperäisessä värähtelyamplitudissa, kun taas muutoksen suuruus riippuu metalliesineen ja anturin välisestä etäisyydestä. Vastaava analogisen signaalin arvo muunnetaan flip-flopilla logiikkasignaaliksi, joka määrittää hystereesiarvon ja kytkentätason.

Kytkin itsessään on tässä yhteydessä puolijohdemuunnin, joka ohjaa tietyn ulkoisen laukaisupiirin tilaa havaitun kohteen sijainnista riippuen ja kohteen sijainti määritetään ilman mekaanista kosketusta anturin kanssa.
Kuten olet todennäköisesti jo ymmärtänyt, herkkä elementti tässä on induktori, jonka magneettipiiri on avoin työalueen suunnassa.
Induktiiviset rajakytkimet kuuluvat suureen ryhmään kosketuksettomat anturit mekanismien asentoa varten, jotka ovat hyvin yleisiä nykyaikaisissa automaattijärjestelmissä.
Tietyn automaatiojärjestelmän induktiivinen lähestymiskytkin toimii päätyökaluna tiettyjen laitteiden asennon tarkkailussa, jonka signaalit käsitellään laitteen käyttötarkoituksesta riippuen tuotelaskimesta, liikeohjaimesta, hälytysjärjestelmästä, jne. n. .
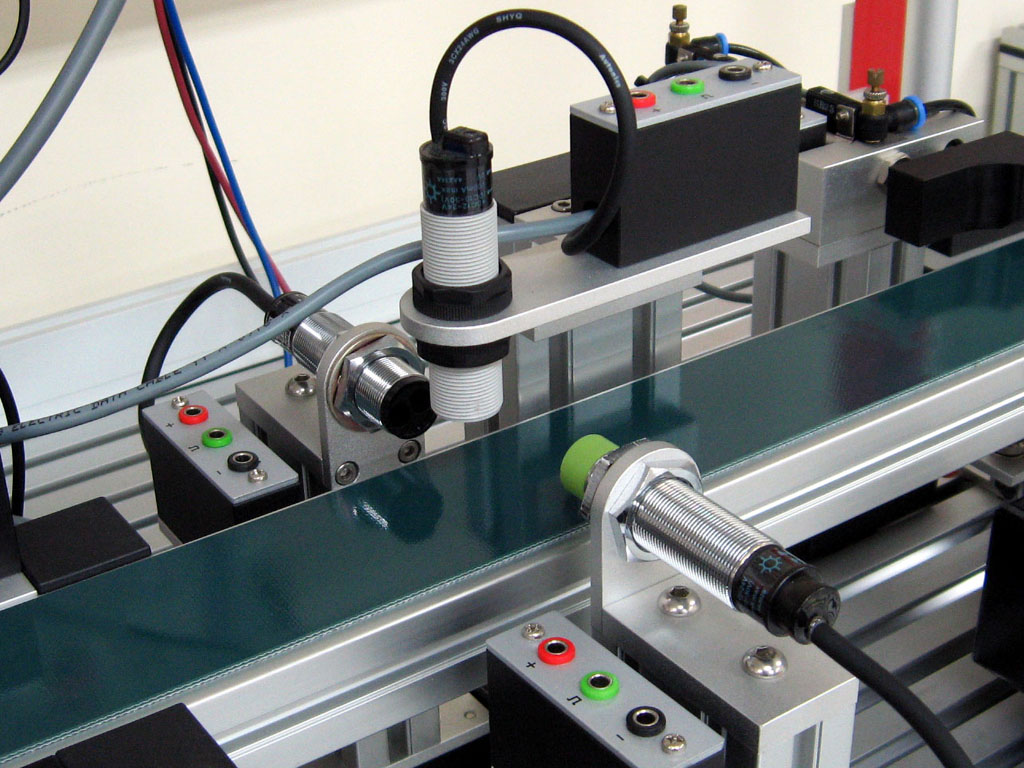
Erityisesti induktiivisia lähestymiskytkimiä käytetään usein metalliesineiden laskemiseen ja niiden sijainnin seuraamiseen, esimerkiksi pullot liikkuvat kuljettimella, jonka korkissa ne lasketaan, tai kokoonpanopajassa tapahtuu työkalun vaihto laskurin, laipan jälkeen. on induktiivisen anturin alueella. …
Kytkimen toimintaprosessi voidaan kuvata seuraavasti. Työskentelytilassa magneettikenttä, jolla on vakioamplitudi, pulsseja kosketuksettoman anturin työpinnan edessä.
Jos metalli tulee lähelle anturia (esimerkiksi pullon tinakorkki tai robottikokoonpanoon osallistuvan osan osa), on taipumus vaimentaa magneettikentän värähtelyjä, vastaavasti arvo. Demoduloidusta jännitteestä laskee, liipaisin laukeaa, joka johtaa kunnes kytkinelementti kytketään (esim. kunnes laskuri aktivoituu tai kunnes työkalu vaihdetaan).
Kaikki riittävän kokoiset metalliesineet, esimerkiksi: akselin ulkonemat, laipat, teräslevyt, kytkinpulttien päät jne., voivat toimia kosketuksettomien induktiivisten kytkimien ohjaus- tai laskentaobjekteina.

Ohjauspiirin kommutointiperiaatteen ja siihen liittämistavan mukaan induktiivisia antureita on saatavana useita eri tyyppejä, eri johtomäärillä. Anturit on rakennettu NPN- tai PNP-kytkimien pohjalta, ne voivat olla normaalisti kiinni tai normaalisti auki.
Kaksijohtiminen - ne on kytketty suoraan kuormapiiriin ja saavat virran sen kautta, tässä on erittäin tärkeää tarkkailla napaisuutta ja nimellistä kuormitusvastusta, muuten anturi ei toimi oikein.
Kolmijohtimiset kytkimet ovat yleisimpiä, niissä on virta kahdella johdolla ja kolmatta käytetään kytketyn kuorman kytkemiseen.
Lopuksi nelijohdinkytkimillä on mahdollisuus valita kytkentätila (normaalisti suljettu tai normaalisti auki).
Toinen yleinen sijaintianturien tyyppi nykyaikaisissa automaattisissa järjestelmissä: Optiset lähestymiskytkimet