Kosketuksettomat anturit mekanismien asentoon
 Tässä artikkelissa puhumme mekanismien asentoantureista. Periaatteessa minkä tahansa anturin päätehtävä on antaa signaali, kun tietty tapahtuma tapahtuu. Eli kun laukaisutapahtuma tapahtuu, anturi aktivoituu ja tuottaa signaalin, joka voi olla analoginen tai diskreetti digitaalinen.
Tässä artikkelissa puhumme mekanismien asentoantureista. Periaatteessa minkä tahansa anturin päätehtävä on antaa signaali, kun tietty tapahtuma tapahtuu. Eli kun laukaisutapahtuma tapahtuu, anturi aktivoituu ja tuottaa signaalin, joka voi olla analoginen tai diskreetti digitaalinen.
Raja-antureita on käytetty paikkaantureina vuosikymmeniä. kytkimet. Ne koostuvat sähkökoskettimista, jotka avautuvat tai sulkeutuvat mekaanisesti, kun jokin muuttuja (asento) saavuttaa tietyn arvon. Erityyppiset rajakytkimet ovat tärkeä osa monia ohjausjärjestelmiä, joiden luotettavuus riippuu niistä. tällaiset anturit sisältävät liikkuvia mekaanisia elementtejä, joiden resurssit ovat rajalliset.
Rajakytkimiä korvataan parhaillaan aktiivisesti erilaisilla lähestymisantureilla. Useimmiten seuraavan tyyppiset läheisyysanturit: induktiivinen, generaattori, magnetohercon ja valoelektroniikka. Näillä antureilla ei ole mekaanista kosketusta liikkuvaan kohteeseen, jonka sijaintia valvotaan.
Kosketuksettomat asentoanturit varmistavat mekanismin suuren nopeuden ja taajuuden. Näiden antureiden tietty haittapuoli on riippuvuus, niiden tarkkuus, syöttöjännitteen ja lämpötilan muutoksista. Vaatimuksista riippuen näiden laitteiden tulostuslaite voi olla seuraava kontaktiton logiikkaelementtija sähköinen rele.
Sähkökäyttöjen tarkkuusjarrutusjärjestelmissä lähestymisantureita voidaan käyttää sekä alasvaihteen että loppupysäytyksen ohjaamiseen.
Nykyään markkinoilla on monenlaisia antureita, mutta tämän artikkelin puitteissa korostamme aihetta suoraan induktiiviset asentoanturit, koska yli 80% tapauksista induktiiviset anturit toimivat antureina mekanismien sijainnille.
Induktiivinen anturi laukeaa, kun metalli lähestyy laukaisualuettaan. Tästä syystä induktiivisia asentoantureita kutsutaan myös läsnäoloantureiksi, läheisyysantureiksi tai yksinkertaisesti induktiivisiksi kytkimiksi.
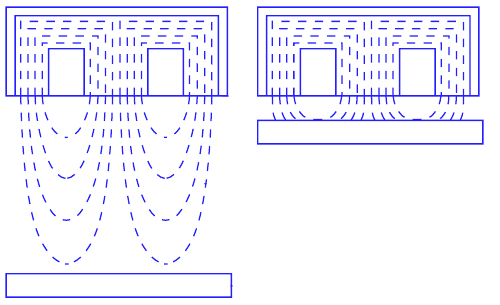
Tarkastellaan nyt induktiivisen anturin toimintaperiaatetta. Kuten edellä mainittiin, kun metalli on tarpeeksi lähellä laukaisualuetta, anturi aktivoituu. Tämä ilmiö koostuu osapuolten vuorovaikutuksesta induktorit metallin lähestyessä sitä, mikä muuttaa jyrkästi kelan magneettikentän suuruutta, mikä johtaa anturin aktivoitumiseen, se laukeaa, vastaava signaali ilmestyy sen ulostuloon.
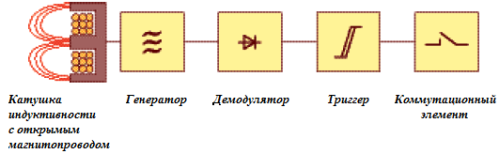
Laitteen elektronisessa osassa on ohjauspiiri, joka puolestaan ohjaa rele- tai transistorikytkintä. Se koostuu seuraavista osista:
-
Generaattori, joka luo sähkömagneettisen kentän, joka tarvitaan vuorovaikutukseen kohteen kanssa.
-
Schmitt-liipaisin tarjoaa kytkentähystereesin.
-
Vahvistin, joka lisää signaalin amplitudia niin, että se saavuttaa vaaditun aktivointiarvon.
-
LED-merkkivalo ilmoittaa kytkimen tilasta. Se tarjoaa myös suorituskyvyn seurannan ja konfiguroinnin.
-
Yhdiste, joka suojaa kiinteiden hiukkasten ja veden tunkeutumiselta.
-
Kotelo anturin kiinnitystä varten ja suojaa erilaisilta mekaanisilta vaikutuksilta. Se on valmistettu messingistä tai polyamidista ja viimeistelty kiinnikkeillä.
Induktiivisia asentoantureita käytetään laajalti teollisuusautomaatiojärjestelmissä, joissa on tarpeen määräajoin tai jatkuvasti määrittää minkä tahansa mekanismin osan sijainti. Anturi tuottaa signaalin, joka lähetetään taajuusmuuttajaan. Käynnistin, ohjain, rele, taajuusmuuttaja jne. voivat toimia toimeenpanomekanismina. Tärkeintä on, että anturin parametrit vastaavat taajuusmuuttajan parametreja jännitteen ja virran suhteen.
Suurin osa antureista ei ole teholaitteita, ne ovat ensisijaisesti signalointilaitteita, joten anturi itse ei pääsääntöisesti kytke mitään voimakasta, vaan vain ohjaa, antaa ohjaussignaalin, toimii toiminnan aloituslaitteena, joka voidaan jo kytkeä virran kytkemiseen.
Nykyaikaiset induktiiviset asentoanturit löytyvät useimmiten kahdesta muovi- tai metallikoteloversiosta: suorakaiteen tai sylinterin muotoisista. Pyöreän poikkileikkauksen anturin halkaisija voi olla 4-30 mm, mutta yleisimmin käytetyt halkaisijat ovat 18 ja 12 mm.
Kun anturi asennetaan laitteeseen, metallilevyn ja anturin käyttöalueen väliin asetetaan rako, yleensä tämä etäisyys ei ylitä anturin halkaisijaa ja yleensä se osoittautuu 2-3 kertaa pienemmäksi kuin sen halkaisija.
Kytkentämenetelmän mukaan induktiiviset asentoanturit voivat olla kaksi-, kolmi-, neli- ja viisijohtimia.
Kaksijohtiminen kytke suoraan kuorma, kuten käynnistyskela, eli ne toimivat kuin perinteinen kytkin. Kaksijohtimiset anturit vaativat kuormituskestävyyttä, joten ne eivät aina sovellu luotettavaksi työkaluksi, mutta ne eivät menetä merkitystään.
Kuorma kytketään yksinkertaisesti sarjaan anturin kanssa, jos käytetään vakiojännitettä, on tärkeää tarkkailla napaisuutta, jos vuorottelunapaisuus ei ole tärkeä, pääasia on kytketty teho ja virta.
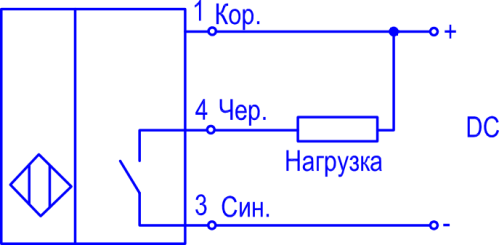
Kolmijohtimisissa antureissa on kolmas johto, joka syöttää itse anturia, ja tämä on suosituin ratkaisu. Neli- ja viisijohtimisissa antureissa on transistori- tai relelähdöt kuorman kytkemistä varten, ja viidennen johdon avulla voit valita anturin toimintatilan, lähtöjen alkutilan.
Koska lähdöt voivat olla sekä rele- että transistoreja, anturit jaetaan vastaavasti kolmeen tyyppiin lähtöjen laitteen mukaan: rele, npn ja pnp.
Anturit relelähdöllä
Relelähdöllä varustetussa anturissa on syöttöpiirin galvaaninen erotus mukana tulevasta piiristä. Se kytkee yhden johdon ja kytketyn piirin jännite ei ole erityisen kriittinen. Koska anturin virransyöttöpiiri on galvaanisesti eristetty, voidaan tätä pitää releanturin etuna. Tämän tyyppiset anturit ovat yleensä suuria.
Anturit pnp-transistorilähdöllä
Anturin lähdössä on pnp-transistori, joka kommutoi positiivisen johdon kuorman kanssa. Lähtö-pnp-transistorin kollektoripiiriin on kytketty kuorma, joka on kytketty pysyvästi negatiiviseen toisen johdon kautta.
Anturit npn-transistorilähdöllä
Anturin lähdössä on NPN-transistori, joka kommutoi negatiivisen johtimen kuorman kanssa. Lähtö npn-transistorin kollektoripiiriin on kytketty kuorma, joka on kytketty pysyvästi toisella johdolla positiiviseen johtoon.
Lähtöjen alkutilan mukaan induktiiviset asentoanturit voivat olla normaalisti suljettuja tai normaalisti avoimia koskettimia. Alkutila tarkoittaa, että tämä tila on sillä hetkellä, kun anturi ei ole vielä lauennut, eli se ei ole aktivoitu.
Jos lähtökoskettimet ovat normaalisti kiinni, kuorma kytketään joutokäynnillä, jos se on normaalisti auki, niin kunnes anturi laukeaa, kuormitus katkeaa eikä taajuusmuuttajaan (esim. kontaktoriin) tule virtaa. Normaalisti suljetut koskettimet on merkitty englanninkielisessä muodossa — N.C. (Normaalisti suljettu), Normaalisti auki – N.O. (Normaalisti auki).
Transistorilähdöillä varustettuja antureita on siis neljää tyyppiä: kahta tyyppiä johtavuuden mukaan (pnp tai npn) ja kahta tyyppiä lähtöjen alkutilan mukaan. Myös käynnistyksessä tai sammutuksessa voi esiintyä viivettä.

Anturiin kytketyn taajuusmuuttajan tyypistä ja virransyöttötavasta riippuen anturin logiikka voi olla positiivinen tai negatiivinen. Tämä johtuu jännitetasosta, joka aktivoi laitteen tulon.
Jos tulo aktivoituu, kun toimilaitteen negatiivinen johto on kytketty maahan, miinukseen, niin logiikkaa kutsutaan negatiiviseksi, tällainen kytkentä on ominaista antureille, joissa on npn-tyyppiset transistorilähdöt.
Positiivinen logiikka vastaa taajuusmuuttajan positiivisen johdon kytkemistä positiiviseen virtalähteeseen aktivoituna, tämä logiikka on tyypillistä antureille, joissa on pnp-transistorilähdöt. Useimmiten mekanismien asennon induktiivisten antureiden toiminnassa on positiivinen logiikka.
Vanhemmat yleisimmin käytetyt induktiiviset asentoanturit
Induktiiviset asentoanturit IKV-22
Induktiiviset anturit IKV-22. Näiden antureiden toiminta perustuu periaatteeseen muuttaa teräsytimen kelojen induktiivista vastusta, kun magneettipiirin ilmarako muuttuu.
Kahdella kelalla varustettu magneettipiiri on asennettu teräslevylle, joka on suljettu muovisuojalla. Kaksi MBGP-kondensaattoria (toinen kapasiteetti 15 μF, 200 V, toinen kapasiteetti 10 μF, 400 V) on kiinnitetty levyyn pohjapuolelta. Kondensaattorit on peitetty kannella. Kaapeli liitetään tiivisteen kautta. Mekanismiin asennetaan magneettinen shuntti, jonka mittojen tulee olla vähintään: paksuus 2 mm, leveys 80 mm, pituus 140 mm. Magneettipiirin ja shuntin välinen ilmarako on 6 ± 4 mm.
Lähtörele kytkeytyy yleensä päälle ja pois päältä sillä hetkellä, kun magneettinen shuntti kulkee anturin läpi, jolloin kelan induktiivisen resistanssin muutoksen vuoksi tapahtuu virran resonanssi ja virta relekäämin läpi laskee. Nämä releet: tyyppi MKU-48, 12 V AC, syöttövirta enintään 0,45 A, pudotusvirta vähintään 0,1 A.Anturipiirin syöttöjännite on 24 V AC rele.
Induktiiviset asentoanturit ID-5
Metallurgisissa työpajoissa käytetään ID-5-tyypin induktiivisia antureita, jotka on suunniteltu toimimaan ympäristön lämpötiloissa jopa + 80 ° C ja kosteudessa jopa 100%. Sähköä johtava pöly ja kalkki ovat hyväksyttäviä. Anturin kanssa käytetään UID-10-tyyppistä puolijohdelähtövahvistinta. Vahvistimen lähtöteho (25 W) riittää käynnistämään laajalti levinneitä REV-800 releitä, kontaktoreita KP21, MK-1 jne.
Anturin ja havaitun ferromagneettisen kohteen välinen ilmarako voi olla jopa 30 mm. ID-5-anturin mitat ovat 187x170x70 mm, syöttöjännite 220 V ± 15%, 50 Hz.
Pienet BSP-kontaktittomat kytkimet
Pieniä liikekytkintä BSP-2 (kosketuksettomalla lähdöllä logiikkaelementtiin) ja BRP (lähtö releeseen PE-21, 24 V, 16 Ohm) käytetään metallinleikkauskoneissa.
BSP-2-kytkin koostuu differentiaalimuuntaja-anturista ja puolijohdelpasista. Ensimmäisen anturikelan magneettijärjestelmää liikuttaa teräslevy, ja toista käämiä manipuloidaan sen liikkuessa litteään ankkurimekanismiin yhdistetyn magneettijärjestelmän yli. Kelat kytketään päälle vastakkaiseen suuntaan.
Jos ankkuri on anturin yläpuolella, kelojen induktiiviset reaktanssit ovat yhtä suuret ja differentiaalimuuntajan anturin lähtö on nolla. Tässä tapauksessa liipaisimen lähtöön ilmestyy vähintään 2,5 V jännite, joka riittää logiikkaelementin toimintaan.
Jos anturin yläpuolella ei ole ankkuria, liipaisuun syötetään jännite, joka palauttaa sen alkuperäiseen tilaan. Tällöin kytkimen lähtösignaali on nolla.
BRP-kytkimen toimintaperiaate on monella tapaa samanlainen kuin BSP-2:n.. Kotelon sisään on asennettu induktiivinen anturi (differentiaalimuuntajan piirin mukaan), liipaisin ja vahvistin. Toissijaiset kelat, joilla on eri kierrosluku, kytketään päälle vastakkaiseen suuntaan. Kun ankkuri menee päällekkäin anturin magneettijärjestelmän kanssa, signaali heikkenee ja vaiheen vaihtamisen jälkeen liipaisin kytkeytyy ja ulkoinen lähtörele (PE-21, 24 V, 16 Ohm) aktivoituu.
Mekanismiin kiinnitetyn ankkurin mitat ovat 80x15x3 mm. Ankkurin ja anturin välinen rako on 4 mm. Kytkimien tarkkuus nimellistilassa on ± 0,5 mm, käyttöero on enintään 5 mm. klo. syöttöjännitteen ja lämpötilan vaihtelut, BSP-2- ja BRP-kytkimien virhe voi olla ± (2,5-f-3,0) mm.
Korkeataajuiset induktiiviset anturit VKB
VKB-tyyppisiä erittäin tarkkoja induktiivisia antureita, joissa on U-muotoinen tai litteä ankkuri, käytetään myös metallinleikkauskoneiden automatisointiin. Sisäänrakennetun muuntajan navat muodostavat avoimen sähkömagneettisen järjestelmän. Työilmarako on 0,1-0,15 mm.
Lähtöjännite muuntajan toisiokäämistä syötetään differentiaaliseen mittauspiiriin ja sitten transistorivahvistimeen. Anturin kokonaisvirhe lämpötilan vaihteluilla 5 - 40 ° C ja jännitteellä 85 - 110% nimellisarvosta on ± (0,064-0,15) mm, vasteero ei ylitä 0,4 mm. Mekanismin suurin liikenopeus on 10 m / mm. Anturin mitat 62x34x24 mm. Syöttöjännite 12V.
Erikoistyyppisten tarkkuusinduktiivisten antureiden erotuspiirillä varustettujen metallinleikkauskoneiden virhe on alle ± 0,01 mm.Tällaisia antureita ovat kosketukseton VPB12-tyyppinen liikekytkin, joka koostuu elektroniikkayksikössä olevasta anturiyksiköstä. Anturiyksikkö sisältää induktiivisen työanturin, induktiivisen kompensointianturin ja piirilevyt. Mekanismi on asennettu: ohjaus ferriittielementti. Syöttöjännite 12 V DC. Suurin valotusetäisyys on enintään 0,12 mm. Anturin lähtöön voidaan kytkeä RPU-0-tyyppinen rele. Lähtölaitteen suurin kuormitusvirta on 0,16 A.
Generaattorin asentoanturit
Tämän tyyppiset anturit ovat kompakteja ja erittäin tarkkoja. KVD-6M- ja KVD-25-sarjan anturigeneraattorit (aukoilla), KVP-8 ja KVP-16 (lentokone) ovat osoittautuneet hyvin. Ne soveltuvat käytettäväksi korkeissa kosteus- ja pölypitoisuuksissa. Anturin transistoripiirin elementit (generaattori ja liipaisin) sijaitsevat iskunkestävästä polystyreenistä valmistetussa kotelossa. Tiivistys tehdään kylmäkovettuvalla seoksella. Käyttölämpötila-alue on -30 - +50 °C.
HPC-anturi tuottaa erillisen signaalin, kun metallilevy ("lippu") kulkee aukon läpi, mikä aiheuttaa katkon liipaisimen generoinnissa ja kytkemisessä. Raon leveys on 6 mm KVD-6M-anturille ja 25 mm KVD-25-anturille.
KVP-8 ja KVP-16 anturit aktivoituvat, kun metallilevy kulkee niiden ohi enintään 8 ja 16 mm etäisyydeltä.