Anturin kytkentäkaaviot
Antureiden kytkentäkaaviot, joita kutsutaan yleisemmin mittauspiirejä, on suunniteltu muuntamaan anturin lähtöarvo, ja useimmissa tapauksissa tämä on muutos niiden sisäisessä resistanssissa, mukavammaksi arvoksi sen myöhempää käyttöä varten. Pääsääntöisesti kyseessä on sähkövirta tai jännitteen muutos, joka voidaan määrittää joko suoraan sähköisellä mittauslaitteella tai vahvistettuna syöttää sopivaan toimilaitteeseen tai tallennuslaitteeseen.

Näihin tarkoituksiin käytetään laajalti seuraavia kytkentämenetelmiä:
-
johdonmukainen,
-
jalkakäytävä,
-
ero,
-
kompensoiva.
Sekvenssipiirikaavio koostuu DC- tai AC-lähteestä, itse Rx-anturista, mittalaitteesta tai suorakäyttömekanismista ja yleensä lisäresistanssista Rd, joka rajoittaa tämän piirin virtaa (kuva 1). Tällaista kytkentäpiiriä käytetään useimmiten laajalti vain kosketinanturien kanssa, joiden Rx = 0 tai Rx = ?.
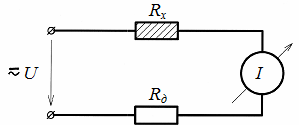
Riisi. 1. Sarjapiiri anturien kytkemistä varten
Koska työskenneltäessä muiden mittauslaitteen piirissä olevien antureiden kanssa, virtaa aina lausekkeella I = U /(Rx + Rd) määritetty sähkövirta ja pieni muutos anturin sisäisessä resistanssissa johtaa hyvin pieneen muutokseen. tässä virrassa. Tuloksena käytetään mittauslaitteen asteikon minimiosuutta ja mittauksen tarkkuus laskee käytännössä nollaan. Siksi useimmissa muissa antureissa käytetään erityisiä mittauspiirejä, jotka lisäävät merkittävästi mittauksen herkkyyttä ja tarkkuutta.
Yleisimmin käytetty siltapiiri kytkentä, jossa yksi ja joskus useita antureita kytketään tietyllä tavalla yhteen ylimääräisillä vastuksilla nelikulmassa (ns. Winstonin silta), jossa on kaksi diagonaalia (kuva 2). Yksi niistä, nimeltään a-b tehodiagonaali, on suunniteltu kytkemään tasa- tai vaihtovirtalähde, ja toinen, c-d-mittausdiagonaali, sisältää mittauslaitteen.
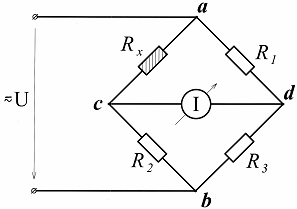
Riisi. 2. Siltapiiri anturien liittämistä varten
Jos nelikulmion vastakkaisten sivujen (siltahaarojen) vastusarvojen tulot ovat yhtä suuret Rx x R3 = R1NS R2, pisteiden c ja d potentiaalit ovat yhtä suuret eikä mittausdiagonaalissa ole virtaa. Tätä siltapiirin tilaa kutsutaan yleisesti sillan tasapaino, eli siltapiiri on tasapainotettu.
Jos Rx-anturin vastus muuttuu ulkoisen vaikutuksen vuoksi, tasapaino häiriintyy ja tämän vastuksen muutokseen verrannollinen virta kulkee mittauslaitteen läpi. Tässä tapauksessa tämän virran suunta osoittaa, kuinka anturin vastus on muuttunut (lisännyt tai laskenut).Tässä sopivalla mittauslaitteen herkkyyden valinnalla kaikki työvaaka.
Tarkasteltavana olevaa siltapiiriä kutsutaan ns epätasapainoinen, koska mittausprosessi tapahtuu klo epätasapaino silta, ts. epätasapaino. Epätasapainoista siltapiiriä käytetään useimmiten tapauksissa, joissa anturin vastus ulkoisten voimien vaikutuksesta voi muuttua erittäin nopeasti aikayksikköä kohden, mutta tällöin mittalaitteen sijasta on tarkoituksenmukaisempaa käyttää tallennuslaitetta, joka tallentaa nämä muutoksia.
Sitä pidetään herkempänä tasapainotettu siltapiiri, jossa erityinen mittareostaatti R (kuva 3), joka on varustettu asteikolla ja jota kutsutaan mittaustekniikassa reochordiksi, on lisäksi kytketty kahteen vierekkäiseen varteen.
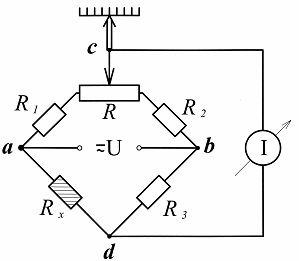
Riisi. 3. Tasapainotettu siltapiiri
Kun työskentelet tällaisen piirin kanssa, siltapiiri on tasapainotettava jokaisella anturin vastuksen muutoksella mukana toimitetulla liukusäätimellä, ts. kun mittausdiagonaalissa ei ole virtaa. Tässä tapauksessa mitatun parametrin arvo (anturin resistanssiarvon muutos) määritetään erityisellä asteikolla, joka on varustettu tällä tietueella ja kalibroitu anturin mittaaman arvon yksiköissä.
Tasapainotetun sillan suurempi tarkkuus selittyy sillä, että on helpompi määrittää mittauslaitteen virran puute kuin mitata sen arvo suoraan, ja sillan tasapainottaminen tällaisissa tapauksissa suoritetaan pääsääntöisesti käyttämällä erityinen sähkömoottori, jota ohjataan siltapiirin epäsymmetriasignaalilla.
Antureiden kytkentäsiltapiirejä pidetään yleismaailmallisina, koska niitä voidaan käyttää sekä tasa- että vaihtovirralla, ja mikä tärkeintä, näihin piireihin voidaan kytkeä useita antureita samanaikaisesti, mikä lisää paitsi herkkyyttä myös mittaustarkkuus.
Differentiaalipiiri anturien sisällyttäminen on rakennettu käyttämällä erityistä muuntajaa, joka saa virtansa vaihtovirtaverkosta, jonka toisiokäämi on jaettu kahteen identtiseen osaan. Siten tähän piiriin (kuva 4) muodostuu kaksi vierekkäistä piiriä, joilla kullakin on oma virtasilmukka I1 ja I2. Ja mittauslaitteen virran arvo määräytyy näiden virtojen eron perusteella, ja jos anturin Rx ja lisävastuksen Rd resistanssit ovat samat, mittauslaitteessa ei ole virtaa.
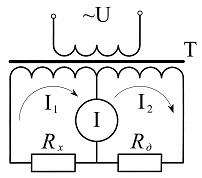
Riisi. 4. Differentiaalisensorin kytkentäpiiri
Kun anturin vastus muuttuu, tähän muutokseen verrannollinen virta kulkee mittauslaitteen läpi, ja tämän virran vaihe riippuu tämän vastuksen muutoksen luonteesta (lisäys tai lasku). Differentiaalipiirin virransyöttöön käytetään vain vaihtovirtaa, ja siksi on tarkoituksenmukaisempaa käyttää antureina reaktiivisia antureita (induktiivisia tai kapasitiivisia).
On erityisen kätevää käyttää tällaista kytkentäpiiriä, kun työskentelet differentiaalisen induktiivisen tai kapasitiivisen antureiden kanssa. Tällaisia antureita käytettäessä tallennetaan paitsi esimerkiksi ferromagneettisen ytimen (kuva 5) liikkeen suuruus, myös tämän liikkeen suunta (sen merkki), minkä seurauksena vuorottelun vaihe. mittauslaitteen läpi kulkeva virta muuttuu.Tämä lisää edelleen mittauksen herkkyyttä.
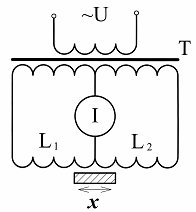
Riisi. 5. Induktiivisen differentiaalisensorin kytkentäkaavio
On huomattava, että mittauksen tarkkuuden lisäämiseksi joissakin tapauksissa käytetään muun tyyppisiä samanlaisia mittauspiirejä, esim. tasapainotetut differentiaalipiirit… Tällaisia piirejä ovat joko toistuva sointu tai erityinen mittausautomuuntaja erityisellä asteikolla, ja mittausprosessi tällaisilla piireillä on samanlainen kuin mittaukset balansoidulla siltapiirillä.
Korvausjärjestelmä anturien sisällyttämistä pidetään tarkimpana kaikista edellä käsitellyistä. Sen toiminta perustuu lähtöjännitteen kompensointiin tai EMF:ään. sitä vastaava anturi mittausreostaatin (reochord) jännitehäviön suhteen. Kompensointipiirin virtalähteenä käytetään vain tasavirtalähdettä ja sitä käytetään pääasiassa DC-generaattoriantureiden kanssa.
Tarkastellaan tämän piirin toimintaa käyttämällä esimerkkiä termoparin käyttämisestä anturina (kuva 6).
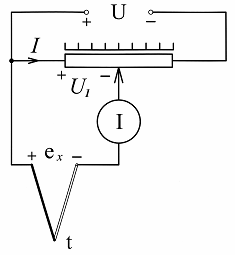
Riisi. 6. Kompensointipiiri lämpösähköisen anturin kytkemiseksi päälle
Syötetyn jännitteen U vaikutuksesta mittausreostaatin läpi kulkee virta, joka aiheuttaa jännitteen U1 pudotuksen reostaatin osassa sen vasemmasta lähdöstä moottoriin. Jos tämä jännite ja EMF-termoparit ovat yhtä suuret, glukometrin läpi ei kulje virtaa.
Jos emf-anturin arvo muuttuu, on tarpeen saavuttaa tämän virran puuttuminen uudelleen liukusäätimen liukusäätimellä. Tässä, kuten tasapainosiltapiirissä, mitatun parametrin arvo, tässä tapauksessa lämpötila (emf termopari) määräytyy liukulangan mittakaavan mukaan, ja sen moottorin liike suoritetaan useimmiten myös erityisen sähkömoottorin avulla.
Kompensointipiirin suuri tarkkuus johtuu siitä, että mittauksen aikana anturin tuottamaa sähköenergiaa ei kuluteta, koska virta sen sisällyttämispiirissä on nolla. Tätä piiriä voidaan käyttää myös parametristen antureiden kanssa, mutta silloin tarvitaan ylimääräinen tasavirtalähde, jota käytetään parametrisen anturin tehonsyöttöpiirissä.