Asynkronisten moottoreiden rakenteelliset muodot
 Ulkoiset rakennemuodot asynkroniset moottorit määräytyy moottorin asennustavan ja sen suojan muodon mukaan ympäristön vaikutuksilta. Normaali jalkojen motoriikka on yleistä (kuva 1, a). Tässä tapauksessa moottorin akselin on oltava vaakasuorassa. Laipallisia moottoreita (kuva 1, b) käytetään laajalti vaaka- ja pystyasennuksiin.
Ulkoiset rakennemuodot asynkroniset moottorit määräytyy moottorin asennustavan ja sen suojan muodon mukaan ympäristön vaikutuksilta. Normaali jalkojen motoriikka on yleistä (kuva 1, a). Tässä tapauksessa moottorin akselin on oltava vaakasuorassa. Laipallisia moottoreita (kuva 1, b) käytetään laajalti vaaka- ja pystyasennuksiin.
He valmistavat myös inline-induktiomoottoreita, joissa ei ole runkoa, päätykilpiä tai akselia. Tällaisen moottorin elementit on upotettu koneen rungon osiin, ja moottorin akseli on yksi koneen akseleista (usein kara) ja alusta on konekokoonpanon runko, esimerkiksi hiomapää (kuva 11). . 2).
Erikoismallimoottoreita on laajalti levinnyt ulkomaille, mukaan lukien pienikokoiset ja huomattavan pituiset moottorit sekä levymoottorit, joissa on erityisesti sylinterin muotoinen staattori ja rengasmainen ulkoroottori. Myös moottoreita käytetään, kun ne kytketään päälle, kartion muotoinen roottori liikkuu aksiaalisuunnassa kehittäen merkittävän työntövoiman.
Tätä voimaa käytetään vapauttamaan moottorin akseliin vaikuttava mekaaninen jarru sen jälkeen, kun moottori on irrotettu verkkovirrasta. Lisäksi käytetään lukuisia moottorimalleja, joihin on liitetty vaihteistoja, vaihteistoja ja mekaanisia variaattoreita, jotka tarjoavat tasaisen säädön.
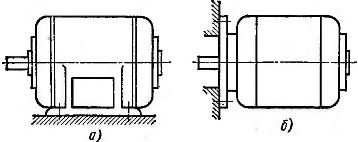
Riisi. 1. Asynkronisten moottoreiden suunnittelu
Erikoismuotoisten moottoreiden käytön haittana on niiden vaihtamisen vaikeus onnettomuuden sattuessa. Viallista sähkömoottoria ei pidä vaihtaa, vaan se on korjattava ja kone käy tyhjäkäynnillä korjauksen aikana.
Koneiden ajamiseen käytetään moottoreita, joissa on erilaisia ympäristönsuojelun muotoja.
Suojatuissa moottoreissa on säleiköt, jotka peittävät päätysuojien tuuletusaukot. Tämä estää vieraiden esineiden pääsyn moottoriin ja estää myös työntekijää koskettamasta pyöriviin ja jännitteisiin osiin. Nestepisaroiden putoamisen estämiseksi ylhäältä moottorit on varustettu alaspäin tai pystysuuntaisilla tuuletusaukoilla.
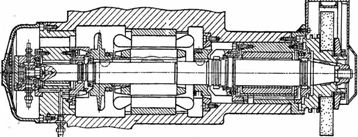
Riisi. 2. Sisäänrakennettu hiomamoottori
Kuitenkin kun tällainen sähkömoottori toimii työpajassa, sen puhallin imee yhdessä ilman kanssa pölyä, suihkuttaa jäähdytysnestettä tai öljyä sekä pieniä teräs- tai valurautahiukkasia, jotka käämin eristykseen kiinnittyessään ja tärisevät kuluttaa eristystä nopeasti vaihtelevan magneettikentän vaikutuksesta.
Suljetuissa moottoreissa, joiden päätyruuduissa ei ole tuuletusaukkoja, on luotettavampi suoja ympäristövaikutuksia vastaan. Tällaisilla moottoreilla, joiden mitat ovat samat kuin suojatuilla, on heikomman jäähdytyksen vuoksi vähemmän tehoa.Samoilla tehoilla ja nopeuksilla suljettu sähkömoottori on 1,5-2 kertaa raskaampi kuin suojattu ja vastaavasti sen hinta on korkeampi.
Halu pienentää suljettujen moottoreiden kokoa ja kustannuksia johti suljettujen puhallettujen sähkömoottoreiden luomiseen. Tällaisessa sähkömoottorissa on ulkoinen tuuletin asennettuna moottorin akselin käyttöpäätä vastakkaiseen päähän ja peitetty korkilla. Tämä tuuletin puhaltaa moottorin kotelon ympäri.
Tuuletinmoottorit ovat huomattavasti kevyempiä ja halvempia kuin suljetut. Puhallettuja moottoreita käytetään useimmiten metallinleikkauskoneiden ajamiseen. Muilla ympäristönsuojelun muodoilla varustettuja moottoreita käytetään suhteellisen harvoin metallinleikkauskoneiden käyttämiseen. Erityisesti suljettuja sähkömoottoreita käytetään joskus hiomakoneiden käyttämiseen.
Sähkömoottorit on suunniteltu 127, 220 ja 380 V:n vakiojännitteille. Sama moottori voidaan kytkeä eri jännitteisiin verkkoihin, esimerkiksi verkkoihin, joiden jännite on 127 ja 220 V, 220 ja 380 V. Kahdella jännitteellä, Sähkömoottorin staattorikäämitys on kytketty kolmioon, suuremmalle - tähteen. Sähkömoottorin käämien virta ja niissä oleva jännite ovat molemmissa tapauksissa samat tämän sisällyttämisen kanssa. Lisäksi ne valmistavat 500 V sähkömoottoreita, joiden staattorit on kytketty pysyvästi tähteen.
Monilla teollisuudenaloilla käytettyjä asynkronisia oravahäkkimoottoreita valmistetaan nimellisteholla 0,6-100 kW per synkroniset nopeudet 600, 750, 1000, 1500 ja 3000 rpm.
Sähkömoottorin käämin johtojen poikkileikkaus riippuu sen läpi kulkevan virran suuruudesta. Suuremmalla virralla moottorin käämityksen tilavuus on suurempi.Magneettipiirin poikkileikkaus on verrannollinen magneettivuon suuruuteen. Tällä tavalla sähkömoottorin mitat määräytyvät virran ja magneettivuon laskettujen arvojen tai sähkömoottorin nimellisvääntömomentin perusteella. Moottorin nimellisteho

jossa P.n — nimellisteho, kW, Mn- nimellismomentti, N • m, nn- nimellisnopeus, rpm.
Saman moottorin nimellisteho kasvaa nimellisnopeuden kasvaessa. Siksi hidaskäyntiset sähkömoottorit ovat suurempia kuin saman tehoiset nopeat moottorit.
Pieniä reikiä hiottaessa tarvitaan erittäin suuria hiontakaran nopeuksia riittävän leikkausnopeuksien saavuttamiseksi. Joten hiottaessa pyörällä, jonka halkaisija on 3 mm, nopeudella vain 30 m / s, karan nopeuden tulisi olla 200 000 kierrosta minuutissa. Suurilla karanopeuksilla puristusvoimaa voidaan vähentää jyrkästi. Samalla pyörän hionta ja karan taivutus vähenevät ja pinnan viimeistely ja koneistustarkkuus paranevat.
Edellä mainitun yhteydessä teollisuudessa on käytössä lukuisia malleja ns. Sähkökarat pyörimisnopeudella 12 000-144 000 rpm tai enemmän. Sähkökara (kuva 3, a) on vierintälaakerien hiomakara, jossa on sisäänrakennettu korkeataajuinen oravahäkkimoottori. Moottorin roottori sijaitsee kahden laakerin välissä karan päässä hiomalaikkaa vastapäätä.
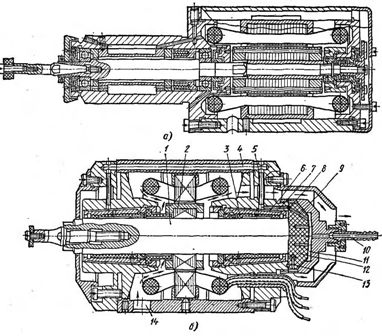
Riisi. 3. Sähkökarat
Sähkökaran staattori on koottu sähköteräslevystä. Bipolaarinen kela asetetaan siihen.Moottorin roottori nopeuksilla 30 000-50 000 rpm on myös valittu peltilevystä ja toimitetaan perinteisellä oikosulkukäämityksellä. Niillä on taipumus pienentää roottorin halkaisijaa niin paljon kuin mahdollista.
Laakerityypin valinta on erityisen tärkeää sähkökarojen toiminnan kannalta. Yleisesti käytetään tarkkuuskuulalaakereita, jotka toimivat kalibroitujen jousien avulla luodulla esijännityksellä. Tällaisia laakereita käytetään pyörimisnopeuksilla, jotka eivät ylitä 100 000 kierrosta minuutissa.
Aerostaattisia laakereita käytetään laajalti teollisuudessa (kuva 3, b). Korkeataajuisen sähkömoottorin akseli 1 pyörii ilmavoideltuissa laakereissa 3. Aksiaalikuorma absorboituu akselin pään ja tukilaakerin 12 välissä olevaan ilmatyynyyn, jota vasten akseli puristuu kotelon sisälle syötetyn ilman paineen alaisena moottorin jäähdytystä varten olevan reiän 14 kautta. Paineilma kulkee suodattimen läpi ja tulee sisään kammion 11 liitoskappaleen 10 kautta. Tästä ilma kulkee kanavan 9 ja pyöreän uran 8 kautta kanavaan 7 ja kammioon 6. Sieltä ilma tulee laakeriin. aukko. Ilmaa syötetään vasempaan laakeriin moottorikotelossa olevien putkien 5 ja kanavien 4 kautta.
Poistoilma poistuu kanavien 13 kautta. Ilmatyyny tukilaakeriväliin syntyy kammiosta 11 huokoisesta hiiligrafiitista valmistetun laakerin läpi kulkevan ilman kautta. Jokaisessa laakerissa on kartiomainen messinki. Siihen puristetaan hiiligrafiittivuoraus, jonka huokoset täytetään pronssilla. Ennen sähkökaran käynnistämistä syötetään ilmaa ja karan ja holkkien väliin muodostetaan ilmatyynyt. Tämä eliminoi kitkan ja laakereiden kulumisen käynnistyksen aikana.Sen jälkeen moottori käynnistetään, roottorin 2 nopeus saavuttaa nimellisnopeuden 5-10 sekunnissa. Kun moottori sammutetaan, roottori 2 pyörii 3-4 minuuttia. Tämän ajan lyhentämiseksi käytetään sähköjarrua.
Turvatyynyjen käyttö vähentää sähkökaran kitkahäviöitä huomattavasti, ilmankulutus on 6-25 m3/h.
Myös nestevoitelulla varustettuja laakereiden sähkökaroja on käytetty. Niiden toiminta vaatii jatkuvaa öljyn kiertoa korkeassa paineessa, muuten laakerien kuumeneminen ei ole hyväksyttävää.
Korkeataajuisten sähkömoottoreiden valmistus vaatii yksittäisten osien tarkkaa valmistusta, roottorin dynaamista tasapainotusta, tarkkaa kokoonpanoa sekä staattorin ja roottorin välisen raon tiukan tasaisuuden varmistamista. Suurtaajuista sähkömoottoria syöttävän virran taajuus valitaan sähkömoottorin vaaditun nopeuden mukaan:

missä nJos sähkömoottorin synkroninen pyörimistaajuus, rpm, f on virran taajuus, Hz, p on napojen lukumäärä, koska p = 1, niin

Sähkökarojen synkronisilla pyörimisnopeuksilla 12 000 ja 120 000 rpm virran taajuuden tulisi olla vastaavasti 200 ja 2 000 Hz.
Erikoisgeneraattoreita käytetään korkeataajuisten moottoreiden tehostamiseen. Kuvassa Kuva 4 esittää kolmivaiheista synkronista induktiogeneraattoria. Generaattorin staattorissa on leveät ja kapeat raot. Kenttäkäämi, joka sijaitsee staattorin leveissä rakoissa, syötetään tasavirralla. Tämän käämin johtimien magneettikenttä suljetaan staattorin hampaiden ja roottorin ulkonemien kautta, kuten kuvassa 1 on esitetty. 4 katkoviivalla.
Roottorin pyöriessä roottorin ulkonemia pitkin liikkuva magneettikenttä ylittää staattorin kapeissa rakoissa sijaitsevan vaihtovirtakäämin kierrokset ja indusoi vaihtuvan e. jne. c. Tämän e. jne. v. riippuu roottorin korvien nopeudesta ja lukumäärästä. Saman vuon indusoimat sähkömotoriset voimat kenttäkäämeissä kumoavat toisensa johtuen käämien lähestyvästä aktivoinnista. Kenttäkäämit saavat virran verkkovirtaan kytketystä tasasuuntaajasta. Staattorissa ja roottorissa on sähköteräslevystä valmistetut magneettisydämet.
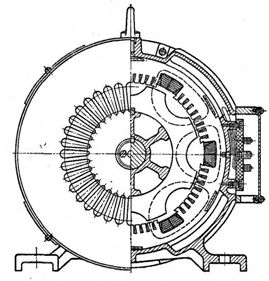
Riisi. 4. Korkeataajuinen induktiogeneraattori
Kuvatun mallin mukaisia generaattoreita valmistetaan nimellisteholle 1-3 kW ja taajuuksille 300-2400 Hz. Generaattorit toimivat asynkronisilla moottoreilla, joiden synkroninen nopeus on 3000 rpm.
Induktiogeneraattoreita, joiden taajuudet ovat lisääntyneet, aletaan korvata puolijohde- (tyristori) muuntimilla. Tässä tapauksessa ne tarjoavat yleensä mahdollisuuden muuttaa virran taajuutta ja siten mahdollisuuden säätää sähkömoottorin pyörimisnopeutta. Jos tällaisen säädön aikana jännite pidetään vakiona, suoritetaan vakiotehosäätö. Jos jännitteen suhde virran taajuuteen (ja siten moottorin magneettivuon) pidetään vakiona, säätö suoritetaan vakiolla kaikilla nopeuksilla pitkäksi aikaa sallitulla vääntömomentilla.
Tyristoritaajuusmuuttajalla ja asynkronisella oikosulkumoottorilla varustettujen taajuusmuuttajien etuja ovat korkea hyötysuhde ja helppokäyttöisyys. Huono puoli on edelleen korkea hinta.Konetekniikassa on suositeltavaa käyttää tällaista taajuusmuuttajaa suurtaajuisille moottoreille. Tämän tyyppisiä kokeellisia käyttölaitteita on luotu maassamme.
Pienitehoisia kaksivaiheisia asynkronimoottoreita käytetään usein työstökoneiden ohjauskäytöissä. Tällaisen moottorin staattorissa on kaksi käämiä: kenttäkäämi 1 ja ohjauskäämi 2 (kuva 5, a). Oravahäkin roottorilla 4 on suuri aktiivinen vastus. Kelojen akselit ovat kohtisuorassa toisiinsa nähden.
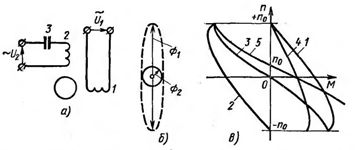
Riisi. 5. Kaksivaiheisen induktiomoottorin kaavio ja sen ominaisuudet
Käämityksiin syötetään jännitteet Ul ja U2. Kun kondensaattori 3 on kytketty käämin 2 piiriin, siinä oleva virta ylittää käämin 1 virran. Tällöin muodostuu pyörivä elliptinen magneettikenttä ja oravan roottori 4 alkaa pyöriä. Jos vähennät jännitettä U2, myös kelan 2 virta pienenee. Tämä johtaa pyörivän magneettikentän ellipsin muodon muutokseen, joka pitenee yhä enemmän (kuva 5, b).
Elliptisen kentän moottorin voidaan katsoa olevan kaksi moottoria yhdellä akselilla, joista toinen toimii sykkivällä kentällä F1 ja toinen pyöreällä kentällä F2. F1 sykkivä kenttämoottori voidaan ajatella kahdeksi identtiseksi pyöreäkentän induktiomoottoriksi, jotka on kytketty pyörimään vastakkaisiin suuntiin.
Kuvassa Kuvassa 5, c on esitetty oikosulkumoottorin mekaaniset ominaisuudet 1 ja 2, jossa on pyöreä pyörimiskenttä ja roottorin merkittävä aktiivinen vastus eri suuntiin pyöritettäessä. Yksivaiheisen moottorin mekaaninen ominaisuus 3 voidaan muodostaa vähentämällä ominaisuuksien 1 ja 2 momentit M kullekin n:n arvolle.Millä tahansa n:n arvolla korkealla roottorin resistanssilla varustetun yksivaihemoottorin vääntömomentti pysähtyy. Pyöreän kenttämoottorin mekaaninen ominaisuus on esitetty käyrällä 4.
Kaksivaiheisen moottorin mekaaninen ominaisuus 5 voidaan muodostaa vähentämällä ominaisuuksien 3 ja 4 momentit M millä tahansa n:n arvolla. Arvo n0 on kaksivaiheisen induktiomoottorin pyörimisnopeus ihanteellisella joutokäyntinopeudella. Säätämällä kelan 2 syöttövirtaa (kuva 5, a) voidaan muuttaa ominaiskäyrän 4 jyrkkyyttä (kuva 5, c) ja siten n0:n arvoa. Tällä tavalla suoritetaan kaksivaiheisen oikosulkumoottorin nopeudensäätö.
Suurilla luistoarvoilla käytettäessä roottorin häviöt tulevat varsin merkittäviksi. Tästä syystä tarkasteltua säätöä käytetään vain pienitehoisille apukäytöille. Kiihtyvyys- ja hidastusajan lyhentämiseksi käytetään kaksivaiheisia induktiomoottoreita, joissa on ontto roottori. Tällaisessa moottorissa roottori on ohutseinäinen alumiininen ontto sylinteri.