Nykyaikaiset harjattomat tasavirtamoottorit
Puolijohdeelektroniikan ja tehokkaiden neodyymimagneettien luomistekniikan ansiosta harjattomia tasavirtamoottoreita käytetään nykyään laajalti. Niitä käytetään pesukoneissa, pölynimureissa, tuulettimissa, droneissa jne.
Ja vaikka ajatus harjattoman moottorin toimintaperiaatteesta ilmaistiin jo 1800-luvun alussa, se odotti siivillään puolijohdekauden alkuun, jolloin teknologiat valmistuivat käytännössä Tämä mielenkiintoinen ja tehokas konsepti, jonka ansiosta harjattomat tasavirtamoottorit pystyivät kulkemaan yhtä laajasti kuin nykyään. …
Englanninkielisessä versiossa niitä kutsutaan tämän tyyppisiksi moottoreiksi BLDC-moottori — Harjattomat tasavirtamoottorit - harjaton tasavirtamoottori. Moottorin roottori sisältää kestomagneetit, ja työkäämit sijaitsevat staattorissa, eli BLDC-moottorilaite on täysin päinvastainen kuin klassisessa harjatussa moottorissa. BLDC-moottoria ohjaa elektroninen ohjain nimeltään ESC – elektroninen nopeudensäädin - elektroninen vakionopeudensäädin.
Elektroninen säädin ja korkea hyötysuhde
Elektroninen säädin mahdollistaa harjattomaan moottoriin syötettävän sähköenergian tasaisen vaihtelun. Toisin kuin yksinkertaisemmat versiot resistiivisistä nopeudensäätimistä, jotka yksinkertaisesti rajoittavat tehoa kytkemällä resistiivisen kuorman sarjaan moottorin kanssa, mikä muuntaa ylimääräisen tehon lämmöksi, elektroninen nopeudensäätö tarjoaa huomattavasti paremman hyötysuhteen tuhlaamatta toimitettua sähkötehoa. energiaa tarpeettomaan lämmitykseen. ..
Harjaton tasavirtamoottori voidaan luokitella itsesynkronoitu synkroninen moottori, jossa säännöllistä huoltoa vaativa kipinäsolmu on kokonaan pois päältä - keräilijä… Keräimen toiminnan ottaa hoitaakseen elektroniikka, minkä ansiosta koko tuotteen muotoilu yksinkertaistuu huomattavasti ja tulee kompaktimmaksi.
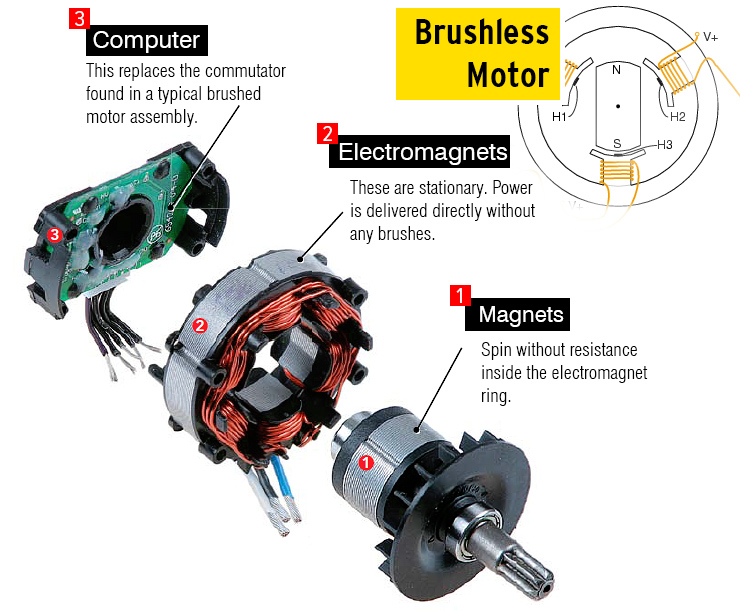
Harjat korvataan itse asiassa elektronisilla kytkimillä, joiden häviöt ovat paljon pienemmät kuin mekaanisella kytkennällä. Roottorin tehokkaat neodyymimagneetit mahdollistavat suuremman vääntömomentin akselille. Ja tällainen moottori lämpenee vähemmän kuin edeltäjänsä kerääjä.
Seurauksena on, että moottorin hyötysuhde on paras ja teho painokiloa kohden on suurempi, plus melko laaja roottorin nopeuden säätöalue ja lähes täydellinen radiohäiriöiden puuttuminen. Rakenteellisesti tämän tyyppiset moottorit on helppo mukauttaa toimimaan vedessä ja aggressiivisissa ympäristöissä.
Elektroninen ohjausyksikkö on erittäin tärkeä ja kallis osa harjattomassa tasavirtamoottorissa, mutta siitä ei voi luopua.Tästä laitteesta moottori saa tehoa, jonka parametrit vaikuttavat samanaikaisesti sekä nopeuteen että tehoon, jonka moottori pystyy kehittämään kuormituksen alaisena.
Vaikka pyörimisnopeutta ei tarvitsisi säätää, tarvitaan silti elektroninen ohjausyksikkö, koska siinä ei ole vain ohjaustoimintoa, vaan siinä on myös virtalähdekomponentti. Voimme sanoa, että ESC on analogi taajuussäädin asynkronisille AC-moottoreillesuunniteltu erityisesti harjattoman tasavirtamoottorin virransyöttöön ja ohjaamiseen.
BLDC moottorin ohjaus
Ymmärtääksemme kuinka BLDC-moottoria ohjataan, muistetaan ensin, kuinka kommutaattorimoottori toimii. Sen ytimessä kehyksen pyörimisen periaate magneettikentässä olevalla virralla.
Joka kerta kun virrallinen kehys pyörii ja löytää tasapainoasennon, kommutaattori (harjat painetaan kollektoria vasten) muuttaa kehyksen läpi kulkevan virran suuntaa ja kehys jatkaa. Tämä prosessi toistetaan, kun kehys liikkuu napasta napaan. Vain kollektorimoottorissa on monia tällaisia kehyksiä ja magneettinapoja on useita, minkä vuoksi harjakerääjässä ei ole kahta kosketinta, vaan monia.
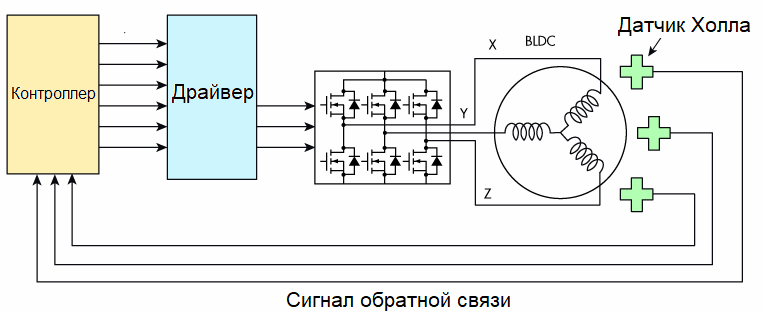
ECM tekee samoin. Se muuttaa magneettikentän napaisuuden heti, kun roottorin on käännyttävä pois tasapainoasennosta. Vain ohjausjännitettä ei syötetä roottoriin, vaan staattorin käämiin, ja tämä tapahtuu puolijohdekytkimien avulla oikeaan aikaan (roottorivaiheet).
On selvää, että harjattoman moottorin staattorikäämityksiin tulee virta syöttää oikeaan aikaan, eli roottorin ollessa tietyssä tunnetussa asennossa. Voit tehdä tämän käyttämällä jotakin seuraavista tavoista.Ensimmäinen perustuu roottorin asentoanturiin, toinen on mittaamalla yhden kelan EMF, joka ei tällä hetkellä saa virtaa.
Anturit ovat erilaisia, magneettisia ja optisia, suosituimpia ovat magneettianturit Hall-ilmiö… Toinen menetelmä (perustuu EMF-mittaukseen), vaikka se on tehokas, ei mahdollista tarkkaa ohjausta pienillä nopeuksilla ja käynnistyksessä. Hall-anturit sen sijaan tarjoavat tarkemman ohjauksen kaikissa tiloissa. Kolmivaiheisissa BLDC-moottoreissa on kolme tällaista anturia.
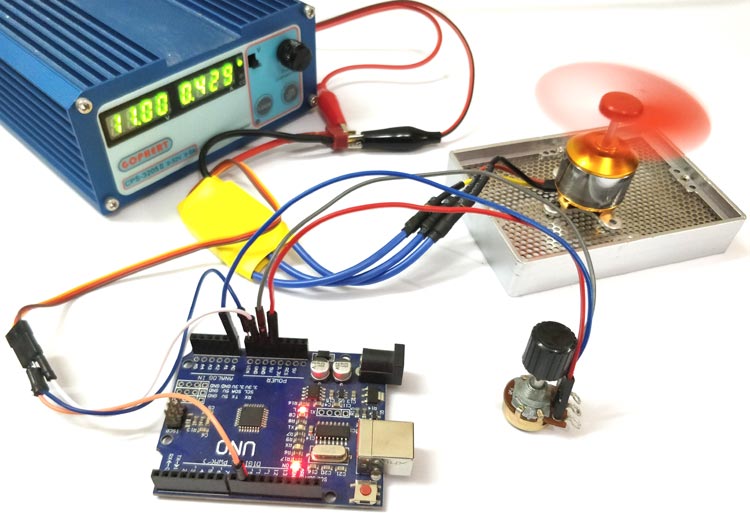
Moottorit, joissa ei ole roottorin asentoanturia, ovat käyttökelpoisia tapauksissa, joissa moottori käynnistyy ilman akselin kuormitusta (tuuletin, potkuri jne.). Jos käynnistys tehdään kuormitettuna, tarvitaan moottori, jossa on roottorin asentoanturi. Molemmilla vaihtoehdoilla on hyvät ja huonot puolensa.
Anturilla varustettu ratkaisu muuttuu kätevämmäksi ohjaukseksi, mutta jos ainakin yksi antureista epäonnistuu, moottori on purettava, lisäksi anturit vaativat erilliset johdot. Anturittomassa versiossa ei tarvita erikoisjohtoja, mutta käynnistyksen aikana roottori heiluu edestakaisin. Jos tätä ei voida hyväksyä, järjestelmään on asennettava anturit.
Roottori ja staattori, vaiheiden lukumäärä
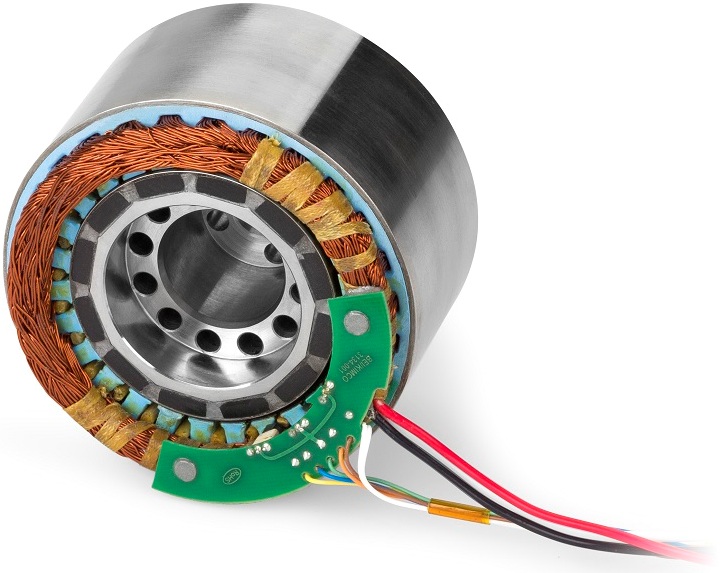
BLDC-moottorin roottori voi olla ulkoinen tai sisäinen ja staattori sisäinen tai ulkoinen. Staattori on valmistettu magneettisesti johtavasta materiaalista, jossa hampaiden lukumäärä jaettuna kokonaan vaiheiden lukumäärällä. Roottori voidaan valmistaa, ei välttämättä magneettisesti johtavasta materiaalista, mutta välttämättä magneeteilla, jotka on kiinnitetty siihen lujasti.

Mitä vahvemmat magneetit, sitä suurempi on käytettävissä oleva vääntömomentti. Staattorin hampaiden lukumäärä ei saa olla yhtä suuri kuin roottorin magneettien lukumäärä.Hampaiden vähimmäismäärä on yhtä suuri kuin ohjausvaiheiden lukumäärä.
Useimmat nykyaikaiset harjattomat DC-moottorit ovat kolmivaiheisia yksinkertaisesti suunnittelun ja ohjauksen yksinkertaisuuden vuoksi. Kuten AC-oikosulkumoottoreissa, kolmen vaiheen käämit on kytketty tässä staattoriin "kolmiolla" tai "tähdellä".
Tällaisissa moottoreissa, joissa ei ole roottorin asentoanturia, on 3 tehojohtoa ja antureilla varustetuissa moottoreissa on 8 johtoa: kaksi lisäjohtoa antureiden virransyöttöä varten ja kolme anturien signaalilähtöjä varten.
Hidaskäyntisissä ulkoroottorimoottoreissa on suuri määrä napoja (ja siten hampaita) vaihetta kohti, jotta saadaan pyörimään kulmataajuudella, joka on huomattavasti pienempi kuin ohjausvirran taajuus. Mutta jopa nopeilla kolmivaihemoottoreilla alle 9 hampaiden määrää ei yleensä käytetä.