Executive DC-moottorit ja takogeneraattorit
Tasavirtamoottorit
 Tasavirtatoimilaitteet ovat automaatiossa ja telemekaniikassa, automatisoitujen laitteistojen automaattisissa ohjaus-, säätö- ja ohjausjärjestelmissä käytettäviä pienitehoisia koneita, joissa ne muuntavat mittauslaitteen sähköisen signaalin – ohjausjännitteen – akselin kulmaliikkeeksi vaikuttaakseen. ohjaus-, säätö- tai ohjauslaitteiston... Tapauksissa, joissa tulosignaali ei riitä käyttömoottorin ohjaamiseen, käytetään magneettista tai puolijohteista tehovahvistinta.
Tasavirtatoimilaitteet ovat automaatiossa ja telemekaniikassa, automatisoitujen laitteistojen automaattisissa ohjaus-, säätö- ja ohjausjärjestelmissä käytettäviä pienitehoisia koneita, joissa ne muuntavat mittauslaitteen sähköisen signaalin – ohjausjännitteen – akselin kulmaliikkeeksi vaikuttaakseen. ohjaus-, säätö- tai ohjauslaitteiston... Tapauksissa, joissa tulosignaali ei riitä käyttömoottorin ohjaamiseen, käytetään magneettista tai puolijohteista tehovahvistinta.
Käyttömoottorit toimivat tyypillisesti usein käynnistyksillä, pysähtymisillä ja peruutuksilla. Niissä on merkittävä käynnistysmomentti ja nopeus. Useimmissa tapauksissa ankkurin vääntömomentin ja nopeuden riippuvuudet ohjausjännitteestä ovat lähellä lineaarisia.
 Sähköpiirien tehonsyöttöjärjestelmästä riippuen erotetaan ankkuriohjatut ja napaohjatut käyttömoottorit.Ankkurinohjauksessa ohjauskäämi on ankkurikäämi, jonka yhteydessä ohjausjännite syötetään sen liittimiin ja jatkuva viritysvirta muodostaa itsenäisen vakiojännitteisen sähköenergian lähteen. Napaohjauksen tapauksessa ohjauskela toimii ensisijaisena napavirityskelana ja ohjausjännite syötetään sen liittimiin, ja itsenäisen tasajännitelähteen asettama ankkuriliittimen jännite pysyy muuttumattomana.
Sähköpiirien tehonsyöttöjärjestelmästä riippuen erotetaan ankkuriohjatut ja napaohjatut käyttömoottorit.Ankkurinohjauksessa ohjauskäämi on ankkurikäämi, jonka yhteydessä ohjausjännite syötetään sen liittimiin ja jatkuva viritysvirta muodostaa itsenäisen vakiojännitteisen sähköenergian lähteen. Napaohjauksen tapauksessa ohjauskela toimii ensisijaisena napavirityskelana ja ohjausjännite syötetään sen liittimiin, ja itsenäisen tasajännitelähteen asettama ankkuriliittimen jännite pysyy muuttumattomana.
Yleensä käytetään ankkuriohjausta. Ohjausjännitteen napaisuuden vaihtaminen saa ankkurin pyörimään vastakkaiseen suuntaan.
Executive DC -moottoreita valmistetaan teholuokilla watin murto-osasta 600 wattiin normaali- ja erikoismalleissa.
 Normaalirakenteiset moottorit ovat samanlaisia kuin yleiskäyttöiset DC-koneet, mutta eroavat niistä siinä, että runko päänapoilla, kuten ankkuri, on koottu ohuista toisistaan eristetyistä sähköteräslevyistä, mikä parantaa näiden koneiden ominaisuuksia. ohimenevissä olosuhteissa. Lisäksi näissä koneissa ei ole ylimääräisiä napoja, koska ankkurireaktio on pieni ja kytkentäprosessit ovat täysin tyydyttäviä. Koska ankkurin nopeus on alhainen, tällaisten moottoreiden akselilla ei ole tuuletinta.
Normaalirakenteiset moottorit ovat samanlaisia kuin yleiskäyttöiset DC-koneet, mutta eroavat niistä siinä, että runko päänapoilla, kuten ankkuri, on koottu ohuista toisistaan eristetyistä sähköteräslevyistä, mikä parantaa näiden koneiden ominaisuuksia. ohimenevissä olosuhteissa. Lisäksi näissä koneissa ei ole ylimääräisiä napoja, koska ankkurireaktio on pieni ja kytkentäprosessit ovat täysin tyydyttäviä. Koska ankkurin nopeus on alhainen, tällaisten moottoreiden akselilla ei ole tuuletinta.
Erikoisrakenteisiin moottoreihin kuuluvat magnetosähköiset koneet, joissa päämagneettikenttä viritetään kestomagneeteilla, sekä alhaisen inertian koneet, jotka eroavat ankkurin suunnittelusta.Jälkimmäisiä ovat: moottorit, joissa on ontto ei-magneettinen ankkuri - ontto ohutseinäinen muovisylinteri, jossa on puristettu kuparilankakäämi, jossa on sisäinen kiinteä ferromagneettinen magneettipiiri, joka on asennettu laakerin suojukseen, ja vähemmän kestävät moottorit levyankkurilla - a ohut ei-magneettinen, keramiikkaa, tekstioliittia, lasia ja joskus alumiinia oleva levy, jossa on painettu kela, joka on levyn molemmille puolille säteittäisesti sijoitettu kuparifoliolankojen sarja, jolla liukuvat hopeagrafiittiharjat. Mainitut mallit niille on tunnusomaista ankkurin alhainen hitausmomentti, mikä takaa käyttömoottorin suuren nopeuden.

Tasavirtakäyttöisten moottoreiden massa on 2 - 4 kertaa pienempi kuin samalla nimellisteholla olevien asynkronisten käyttömoottoreiden massa, ja niiden hyötysuhde nimellisteholla 5 ... 10 W on noin 0,3 ja saavuttaa arvon 0,65 ja vähän. korkeampi moottoreille, joiden nimellisteho on 200–300 W.

DC-takogeneraattorit
 DC-takogeneraattorit ovat pienitehoisia koneita, jotka on suunniteltu muuttamaan mekaaninen arvo sähköiseksi signaaliksi - lähtöjännitteeksi. Niitä käytetään erityisesti ohjaamaan ja mittaamaan sen käyttöakselin nopeutta, johon takogeneraattorin akseli on kytketty, jonka ankkuripuristimet on liitetty mittauslaitteeseen. Lisäksi takogeneraattoreita käytetään sähkömekaanisissa laskentalaitteissa laskentatoimintojen suorittamiseen sekä laitteissa generoitujen kiihdytys- ja vaimennussignaalien automaattiseen käsittelyyn.
DC-takogeneraattorit ovat pienitehoisia koneita, jotka on suunniteltu muuttamaan mekaaninen arvo sähköiseksi signaaliksi - lähtöjännitteeksi. Niitä käytetään erityisesti ohjaamaan ja mittaamaan sen käyttöakselin nopeutta, johon takogeneraattorin akseli on kytketty, jonka ankkuripuristimet on liitetty mittauslaitteeseen. Lisäksi takogeneraattoreita käytetään sähkömekaanisissa laskentalaitteissa laskentatoimintojen suorittamiseen sekä laitteissa generoitujen kiihdytys- ja vaimennussignaalien automaattiseen käsittelyyn.
Tachogeneraattorit ovat magnetosähköisiä, joissa päämagneettikenttä viritetään kestomagneettien avulla, ja sähködynaamisia sähkömagneettisella virityksellä magneettikentän vuoksi. virityskela, jota syöttää riippumaton tasajännitelähde.
Takogeneraattorin lähtöjännite lepotilassa vaihtelee lineaarisesti ankkurin nopeuden mukaan ja kuormituksen alaisena tämä lineaarisuus on jonkin verran häiriintynyt ja mitä enemmän, sitä pienempi vastus ankkurin puristimiin kytketyllä mittalaitteella on. Silti jokaiselle takogeneraattorille on suhteellisen pieni mittausnopeusalue, jonka sisällä riittävän suurella mittauslaitteen resistanssilla ja vakioherätyspiirin olosuhteilla lähtöominaiskäyrää voidaan pitää käytännössä lineaarisena.
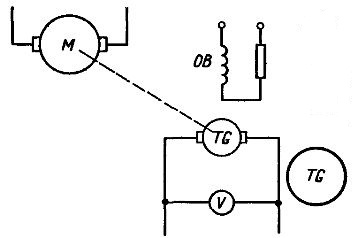
Kaavio itsenäisen virityksen tasavirtatakogeneraattorin sisällyttämisestä
 DC-takogeneraattoreiden merkittävä haittapuoli on lähtöjännitteen vaihtelu, joka johtuu magneettivuon pienestä jaksoittaisesta muutoksesta epätasaisesta ilmavälistä ja ankkurin epätasaisesta johtavuudesta eri säteittäissuunnissa, mukaan lukien ne, jotka johtuvat sen hammasrakenteesta. magneettipiiri, samoin kuin harjojen värähtely, kollektorin karheus ja elliptisyys sekä kytkentäprosessit - suurelta osin eliminoitu ontto-ankkuritakogeneraattorissa, joka on suunniteltu samalla tavalla kuin matalahitainen tasavirtamoottori, jossa on samanlainen armatuuri.
DC-takogeneraattoreiden merkittävä haittapuoli on lähtöjännitteen vaihtelu, joka johtuu magneettivuon pienestä jaksoittaisesta muutoksesta epätasaisesta ilmavälistä ja ankkurin epätasaisesta johtavuudesta eri säteittäissuunnissa, mukaan lukien ne, jotka johtuvat sen hammasrakenteesta. magneettipiiri, samoin kuin harjojen värähtely, kollektorin karheus ja elliptisyys sekä kytkentäprosessit - suurelta osin eliminoitu ontto-ankkuritakogeneraattorissa, joka on suunniteltu samalla tavalla kuin matalahitainen tasavirtamoottori, jossa on samanlainen armatuuri.
Harjojen asennuksen epätarkkuus kierroslukumittarin kollektorin geometriseen neutraalisuuteen johtaa lähtöjännitteen epäsymmetriaan, ts.tuottaa kaksi erilaista jännitettä ankkurikäämiin sen pyörimissuuntaan nähden samalla nopeudella. Harjojen oikealla järjestelyllä jännitteen epäsymmetria on välillä 0,3 - 1 % takogeneraattorin nimellisjännitteestä.