Hissien ja nostokoneiden moottoreiden valinta teholla
 Nykyaikaiset asuin- ja hallintorakennusten matkustaja- ja tavarahissit sekä jotkin miinojen nostokoneet suoritetaan vastapainolla tai, kuten joskus kutsutaan, vastapainolla. Kaivoskoneissa tasapainottaminen, kuten jo todettiin, ei usein tapahdu vastapainolla, vaan toisella nostoaluksella.
Nykyaikaiset asuin- ja hallintorakennusten matkustaja- ja tavarahissit sekä jotkin miinojen nostokoneet suoritetaan vastapainolla tai, kuten joskus kutsutaan, vastapainolla. Kaivoskoneissa tasapainottaminen, kuten jo todettiin, ei usein tapahdu vastapainolla, vaan toisella nostoaluksella.
Hissien vastapaino valitaan tasapainottamaan nostoaluksen (korin) painoa ja osaa nostettavasta nimelliskuormasta:

missä GH on nimellisen nostokuorman paino, N; G0 — ohjaamon paino, N; Gnp on vastapainon paino N; α on tasapainotuskerroin, joka yleensä on 0,4-0,6.
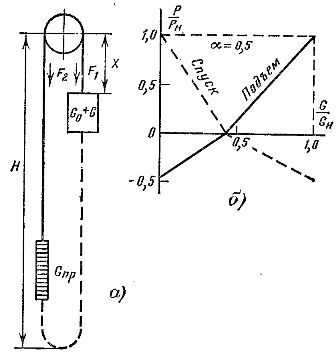
Riisi. 1. Hissin moottorin akselin kuormituksen laskeminen.
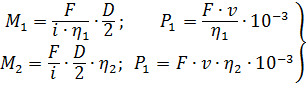
Tarve tasapainottaa raskaita aluksia on ilmeinen, koska niiden siirtämiseen ilman vastapainoa tarvitaan vastaava moottoritehon lisäys. Kyky tasapainottaa osaa nimellishyötykuormasta paljastuu määritettäessä vastaava teho tietylle kuormituskäyrälle.Ei ole vaikeaa seurata esimerkiksi sitä, että jos hissi toimii pääasiassa kuorman nostamiseksi ja tyhjän korin laskemiseksi, niin kuormituskaavion mukaisella ekvivalentilla moottorin teholla on minimiarvo α = 0,5.
Vastapainon läsnäolo johtaa moottorin kuormituskäyrän tasoittumiseen, mikä vähentää sen kuumenemista käytön aikana. Viitaten kuviossa 1 esitettyyn kaavioon. 1, a, sitten vastapainon painoarvolla

ja tasapainotusköyden ja ohjaamon kitkan ja ohjainten vastapainon puuttuminen, voit kirjoittaa:


missä gk on 1 m köyden paino, N / m.
Vetolujuus

Moottorin akselin vääntömomentti ja teho määritetään seuraavien kaavojen perusteella:
jossa M1, P1 — vääntömomentti ja teho, kun taajuusmuuttaja toimii moottoritilassa, vastaavasti Nm ja kW; M2, P2 — vääntömomentti ja teho, kun taajuusmuuttaja toimii generaattoritilassa, vastaavasti Nm ja kW; η1, η2 — kierukkavaihteiston hyötysuhde suoralla ja käänteisellä energiansiirrolla.
η1 ja η2 arvot riippuvat epälineaarisesti kierukkaakselin nopeudesta ja ne voidaan laskea kaavoilla
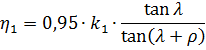

tässä λ on madon indeksointisylinterin spiraaliviivan nousukulma; k1 on kerroin, joka ottaa huomioon häviöt vaihteiston laakereissa ja öljykylvyssä; ρ - kitkakulma, joka riippuu kierukka-akselin pyörimisnopeudesta.
Vetopyörään kohdistuvan voiman kaavasta seuraa, että tasapainotusköyden puuttuessa nostovinssin sähkökäyttöön kohdistuva kuormitus riippuu nostoaluksen asennosta.
Suuren nostokapasiteetin - jopa 10 tonniin, suurten liikenopeuksiensa - 10 m / s ja enemmän, korkeiden 200-1000 m nostokorkeuksien ja ankarien työolosuhteiden vuoksi - kaivoksen nostokoneet on varustettu teräsköysillä, joilla on suuri massa. Kuvittele esimerkiksi, että yksi kulku lasketaan alempaan horisonttiin, kun taas toinen on yläpuolella, ja sillä hetkellä se puretaan. Tässä asennossa koko pääköysi on epätasapainossa, ja nousun alussa moottorin on voitettava kuorman ja köyden painon synnyttämä staattinen momentti. Köyden tasapainottaminen tapahtuu hyppypolun keskellä. Sitten se katkeaa uudelleen ja köyden laskeutuvan osan paino auttaa purkamaan moottoria.
Epätasainen kuormitus erityisesti syvissa kaivoksissa johtaa tarpeeseen yliarvioida moottorin teho, joten yli 200-300 m nostokorkeudella on suositeltavaa tasapainottaa päännostoköydet ripustettujen peräköysien avulla. nostoaluksista. Yleensä peräköysi valitaan samalla poikkileikkauksella ja pituudella kuin pääköysi, minkä seurauksena nostojärjestelmä osoittautuu tasapainoiseksi.
Koska kuorma muuttuu hissien ja nostokoneiden käytön aikana, moottorin akselin tehon tai momentin määrittämiseksi jokaiselle kuormalle on kätevää rakentaa kaavio näiden arvojen riippuvuudesta kuormasta. useissa kohdissa, jolla on suunnilleen sama luonne kuin kuvassa 10 on esitetty. 1b ja käytä sitä sitten kuormituskaavioiden rakentamisessa.
Tällöin on tiedettävä nostokoneen sähkökäytön toimintatapa, joka määräytyy pitkälti PV-aktivoinnin suhteellisesta kestosta ja moottorin käynnistysten lukumäärästä tunnissa. Esimerkiksi hisseissä sähkökäytön toimintatapa määräytyy asennuspaikan ja hissin käyttötarkoituksen mukaan.
Asuinrakennuksissa liikenneaikataulu on suhteellisen yhtenäinen ja suhteellinen kesto — PV ja moottorin käynnistystaajuus h ovat 40 % ja vastaavasti 90-120 käynnistystä tunnissa. Korkeissa toimistorakennuksissa hissien kuormitus kasvaa jyrkästi työntekijöiden tulo- ja lähtöaikoina ja vastaavasti lounastauolla korkeilla arvoilla on PV ja h-40-60% ja 150 -200 käynnistystä tunnissa.
Kun piirustus on valmis staattinen kuormitus moottorin akseliin, sähkökäyttöjärjestelmä ja nostimen moottori on valittu, voidaan suorittaa kuormituskaavion rakentamisen toinen vaihe — ottaen huomioon transientin vaikutus kuormituskaavioon.
Täydellisen kuormituskaavion rakentamiseksi on tarpeen ottaa huomioon sähkökäytön kiihtyvyys- ja hidastusajat, ovien avautumis- ja sulkeutumisaika, pysähdysten lukumäärä auton liikkeen aikana, aika matkustajien saapumisesta ja sieltä poistumisesta tyypillisimmän työjakson aikana. Automaattisesti toimivilla hisseillä ovien toiminnan ja korin täyttömäärän määräävä kokonaisaikahäviö on 6-8 s.
Auton kiihtyvyys- ja hidastusajat voidaan määrittää liikekaaviosta, jos auton nimellisnopeus sekä kiihtyvyyden (hidastuksen) ja nykimisen sallitut arvot tunnetaan. Sähkökäyttöjärjestelmän ilmoitettujen staattisten ja dynaamisten tilojen mukaan rakennetun kuormituskaavion mukaan on tarpeen tehdä laskennallinen laskenta moottorista kuumennettaessa käyttämällä yhtä tunnetuista menetelmistä: keskimääräiset häviöt tai vastaavat arvot.
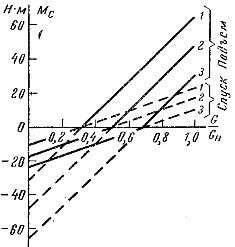
Riisi. 2. Sähkökäytön vääntömomentin riippuvuudet korin, hissin kuormituksesta, kun jälkimmäinen on ensimmäisessä kerroksessa (1), kuilun keskellä (2) ja viimeisessä kerroksessa (3).

Esimerkki. Suurnopeusmatkustajahissin teknisten tietojen mukaan määritä moottorin akselin staattiset momentit eri toimintatiloissa.
Annettu:
• maksimikantavuus Gn = = 4900 N;
• liikenopeus v = 1 m/s;
• nostokorkeus H = = 43 m;
• ohjaamon paino G0 = 6860 N;
• vastapainon paino Gnp = 9310 N;
• vetopalkin halkaisija Dm = 0,95 m;
• vinssin vaihteiston välityssuhde i = 40;
• voimansiirron hyötysuhde, ottaen huomioon ohjaamon kitka akselin ohjaimissa η = 0,6;
• köyden paino GKAH = 862 N.
pöytä 1

Vetolujuus:


Hissijärjestelmän toimiessa, kun Fc > 0, ajava sähkökone toimii moottoritilassa ja kun Fc on 0 ja moottoritilassa, kun Fc < 0.
Staattisten momenttien laskennan tulokset kaavan mukaan on koottu taulukkoon. 1 ja ne on esitetty kuvion 1 kaaviossa. 2.Huomaa, että tarkemmissa laskelmissa tulisi ottaa huomioon vastus akselin ohjaimien liikettä vastaan, joka on 5-15% Fc:stä.