Kuinka johdinauto toimii ja toimii
Monien kaupunkien asukkaat ovat niin tottuneet raitiovaunulla ajamiseen, että he tuskin ajattelevat, että he käyttävät tällä hetkellä ekologista ja varsin taloudellista kulkuvälinettä, kuten monipaikkaista sähköautoa. Samaan aikaan johdinauton laite ei ole vähemmän mielenkiintoinen kuin esimerkiksi raitiovaunun laite. Sukellaanpa hieman syvemmälle tähän aiheeseen.
Nykyaikaisessa johdinbussissa on melko monimutkainen sähköosa. Sen ohjausjärjestelmä perustuu mikroprosessorin ohjaamiin puolijohteisiin, jotka toimivat yhdessä ilmajousituksen, ABS-järjestelmän kanssa ja ovat tiiviissä vuorovaikutuksessa monimutkaisen elektronisen tietojärjestelmän kaikkien osien kanssa. Tämä sisältää mahdollisuuden itsenäiseen liikkumiseen, mikroilmaston säätöjärjestelmän jne.
Siten nykypäivän johdinauto on täysimittainen kaupunkijulkinen ajoneuvo, joka täyttää kaikki turvallisuuden, mukavuuden ja tehokkuuden vaatimukset.

Johdinautojen kehitys kehittyi vähitellen, lähes samalla tavalla kuin linja-autojenkin.On helppo olettaa, että ensimmäisten johdinautojen korirakenteet ja niiden alustat perustuivat alun perin matalalattiabusseihin, kuten Bogdan-E231, MAZ-203T ja muihin. Itse johdinauto ilmestyi kuitenkin paljon myöhemmin. Ja sellaiset modernit kaupunkiautot kuin esimerkiksi Electron-T191 ja AKSM-321 kehitettiin välittömästi johdinautoiksi. Mutta rungon jatkuvuus mallista malliin voidaan silti jäljittää.
Johdinbussin esi-ihminen 1800-luvun lopulla:
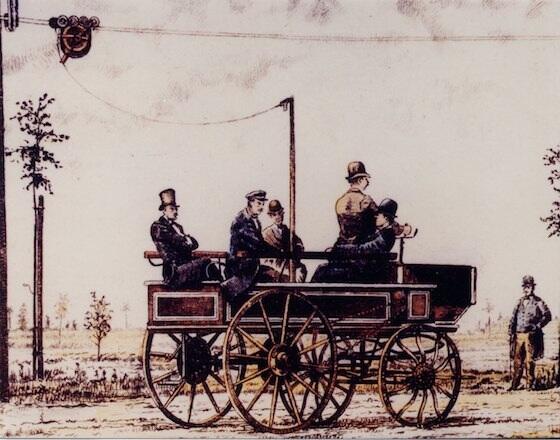
Jo Neuvostoliiton ajoilta lähtien tämä ajoneuvo ajoverkostosta kärryjen kautta tuli käytäntöön syötetään vakiojännite 550 volttia… Se on standardi. Näissä olosuhteissa täyteen lastattu johdinauto voi saavuttaa tasaisella tiellä noin 60 km/h nopeuden.
Vetovoima on alun perin tarkoitettu kaupunkiliikenteeseen, joten se rajoittaa maksiminopeuden 65 km/h. Mutta tälläkin nopeudella ajoneuvo pystyy helposti liikkumaan 4,5 metrin etäisyydellä ajolinjasta. Käännetään nyt huomiomme tämän merkittävän ajoneuvon sähkökomponentteihin.
Johdinauton pääyksikkö on vetokone… Klassisessa versiossa se on DC moottori: lieriömäinen runko, ankkuri harjakeräyslohkolla, tolpat, päätykilvet ja tuuletin.
Useimmat DC-vaunumoottorit ovat sarja- tai yhdistelmämoottoreita. Transistori- tai tyristoriohjauksella varustetut moottorit toimivat vain sarjaviritysjärjestelmän kanssa.
Tavalla tai toisella johdinautojen vetomoottorit ovat varsin vaikuttavia DC-koneita, jotka on suunniteltu noin 150 kW:n teholle ja jotka tarvitsevat ylimääräisen DC-muuntimen normaaliin vakaaseen toimintaan.Itse moottori voi painaa noin tonnin ja kuluttaa noin 300 A virtaa käyttöakselin vääntömomentilla yli 800 N * m (akselin nopeudella 1650 rpm).
Jotkut nykyaikaisten johdinautojen mallit kuljettavat Asynkroniset AC-ajomoottorit, joita käyttävät erilliset AC-vetomuuntimet… Tämän tyyppiset moottorit ovat vähemmän tilaa vieviä, lisäksi tehokkaampia, ne eivät vaadi säännöllistä huoltoa (verrattuna keräinmoottoriin).
Mutta tällaiset moottorit tarvitsevat erityisiä puolijohdemuunnin… Itse moottorissa voi olla pari nopeusanturia, jotka on asennettu akselille. Useimmat asynkroniset AC-ajomoottorit saavat virran 400 V:lla, niissä on oravahäkkiroottori ja kolmivaiheinen staattorikäämitys klassisella "tähti"-liitännällä.

Moottori sijaitsee yleensä johdinauton rungon takaosassa. Sen käyttöakselissa on laippa, jonka avulla mekaaninen voimansiirto tapahtuu kardaaniakselin kautta käyttöakselille vetopyörän kautta.
Moottorin kotelo on täysin eristetty rungosta, joten korkeat jännitteet eivät pääse käsiksi sen johtaviin osiin. Tämä varmistetaan sillä, että laippa on valmistettu eristävästä materiaalista ja moottorin asennus kannakkeisiin ei koskaan ole täydellinen ilman eristäviä holkkeja.
Nykyaikaista johdinauton vetomoottoria ohjaa transistoripulssiohjausjärjestelmä IGBT-transistoreista, jota pidetään täydellisempänä kuin tyristori ja vielä enemmän reostaattipiirejä.
Järjestelmä sisältää kytkentäosan diagnostiikkatietokoneen kytkemiseen moottorin ohjauspiirin säätöä ja säätöä varten sekä koko vetolaitteen kunnon seurantaa varten. Tällainen ohjausjärjestelmä on energiankulutuksen kannalta taloudellisin, ja se mahdollistaa myös ajoneuvon kontaktittoman käynnistyksen ja kiihdytyksen ilman tarpeettomia energiahäviöitä, kuten reostaattijärjestelmän tapauksessa.
Tämän seurauksena ajomoottorin pätevä ohjaus tarjoaa johdinauton pehmeä käynnistys, työntövapaa nopeudensäätö ja luotettava jarrutus. Säädettävä pulssijännite, jonka ankkurivirta on noin 50 A, mahdollistaa johdinbussin sujuvan liikkumisen mekaanisten voimansiirtojen välystä huolimatta.
Nopeudensäätö saadaan portaattomasti myös mahdollisuudesta heikentää kenttäkäämin virtaa ajoneuvon nopeuden saavuttaessa 25 km/h. Jarruttaessa käytetään myös säädettävää virtaa - tätä ns. dynaaminen jarrutus.
Takavaunun nopeusrajoitus on korkeintaan 25 km/h. Elektroniikan ansiosta pysähtyminen on etusijalla käynnistämiseen nähden. Virroittimien työnapaisuutta voidaan tarvittaessa muuttaa.

Suoraan transistori-pulssi johdinautojärjestelmä toimii seuraavasti. Jalkapolkimen painaminen aktivoituu Hall anturi, jonka analogisen signaalin taso liittyy suoraan polkimen nykyiseen asentokulmaan.
Tämä signaali muunnetaan digitaaliseksi ja syötetään jo digitaalisessa muodossa ajoyksikön mikroprosessoriohjaimeen, josta komennot lähetetään kuljettajan kojelautaan. tehotransistorit.
Tehotransistorien ajurit puolestaan säätelevät tehotransistorien virtaa vetoyksikön mikroprosessoriohjaimelta tulevien komentojen mukaan. Ohjainten ohjausjännite on pieni jännite (se vaihtelee välillä 4 - 8 volttia) ja sen arvo määrittää ajomoottorin käämien käyttövirran.
Arvasit sen, tehotransistorit palvelevat täällä puolijohdekontaktoritjänniteohjattu, vain toisin kuin perinteisessä kontaktorissa, tässä virta voi muuttua erittäin, erittäin tasaisesti. Siksi reostaatteja ei tarvita, tarpeeksi yksinkertaista PWM-tekniikka (pulssinleveysmodulaatio).
Jos vaunu on pysäytettävä, niin moottori kytketään generaattoritilaan ja jarrutus tapahtuu olennaisesti ankkurin magneettikentillä, joita myös säädetään, jolloin jarrutus saadaan aikaan lähes täysin ajoneuvon pysähtymiseen saakka. Muuten, suurin osa johdinauton ohjaustransistori-pulssielektroniikasta sijaitsee sen katolla.
Nykyaikaisen johdinauton pysäyttämisessä järjestelmä toimii energian talteenotto… Tämä tarkoittaa, että ajomoottorin generaattoritilassa jarrutuksen aikana tuottama energia palautetaan kosketusverkkoon ja sitä voidaan käyttää uudelleen sekä tästä verkosta rinnan saavien sähköajoneuvojen tarpeisiin että itse johdinauton laitteiden virransyöttöön (hydraulinen). ohjauspyörä, lämmitysjärjestelmä jne.) Jos johdinauto kulkee nuolen alta, niin reostaattinen jarrutus.
Lähes koko johdinauton ajo koostuu useista osista:
-
virroittimet;
-
katkaisija;
-
IGBT-ohjausyksikkö;
-
sääntelyjärjestelmä;
-
liikkeen ja jarrujen ohjain;
-
reostaattien lohko;
-
rikastin häiriöiden estämiseksi;
-
paneelitietokone tai kytkinmoduuli ulkoiseen tietokoneeseen liittämistä varten.
Paneelin tai ulkoisen tietokoneen avulla suoritetaan johdinauton vetomoottorin diagnostiikka, tarkistetaan sen toimintaparametrit, muutetaan asetuksia tarvittaessa mikroprosessoriohjain… Kaikki käyttöparametrit ja vetovoiman nykyinen tila tallennetaan digitaalisesti.
Seuraavassa on joitain ohjausjärjestelmien malleja vuotovirtojen takana ja niillä on oltava asianmukainen suojausjärjestelmä – automaattinen katkaisu verkosta. Valinnaisesti se voi olla myös täällä liikkeelle kulutetun ja pysähtymisen aikana talteen saadun energian laskuri.
Se kannattaa mainita erikseen vaunun suojaelektroniikka, joka parantaa matkustajien turvallisuutta. Esimerkiksi johdinauto ei liiku, kun matkustajan ovet ovat auki tai jarrujärjestelmässä ei ole ilmaa.