Vaihtovirtasähkökoneet
Sähkökoneita käytetään mekaanisen energian muuntamiseen sähköenergiaksi (AC- ja DC-generaattorit) ja päinvastoin (sähkömoottorit).
Kaikissa näissä tapauksissa käytetään oleellisesti kolmea sähkömagnetismin alan päälöytöä: Amperen vuonna 1821 löytämä virtojen mekaanisen vuorovaikutuksen ilmiö, Faraday vuonna 1831 löytämä sähkömagneettisen induktion ilmiö sekä näiden ilmiöiden teoreettinen yhteenveto. Lenz (1834) hyvin tunnetussa indusoidun virran suunnan laissa (itse asiassa Lenzin laki ennusti sähkömagneettisten prosessien energian säilymisen lain).

Mekaanisen energian muuttamiseksi sähköenergiaksi tai päinvastoin on tarpeen luoda johtavan piirin suhteellinen liike virran ja magneettikentän (magneetti tai virta) kanssa.
Jatkuvaan käyttöön suunnitelluissa sähkökoneissa käytetään kiinteän osan (staattorin) sisällä sijaitsevan koneen liikkuvan osan (vaihtovirtakoneen roottorin) pyörivää liikettä.Magneettikentän luovaa koneen käämiä kutsutaan induktoriksi ja käyttövirralla kiertävää käämiä ankkuriksi. Molempia näitä jälkimmäisiä termejä käytetään myös tasavirtakoneissa.
Magneettisen induktion lisäämiseksi koneen käämit asetetaan ferromagneettisille kappaleille (teräs, valurauta).
Kaikilla sähkökoneilla on käännettävyysominaisuus, eli niitä voidaan käyttää sekä sähköenergian generaattoreina että sähkömoottoreina.

Asynkroniset moottorit
Asynkronisia moottoreita käytetään yksi sähkömagneettisen induktion ilmenemismuodoista… Fysiikan kursseilla se osoitetaan seuraavasti:
Kuparikiekon, joka voi pyöriä sen keskustan läpi kulkevan pystyakselin ympäri, alle on sijoitettu pystysuora hevosenkenkämagneetti, jota käytetään pyörimään saman akselin ympäri (levyn ja magneetin välinen mekaaninen vuorovaikutus on poissuljettu). Tässä tapauksessa levy alkaa pyöriä samaan suuntaan kuin magneetti, mutta pienemmällä nopeudella. Jos lisäät levyn mekaanista kuormitusta (esimerkiksi lisäämällä akselin kitkaa painelaakereita vastaan), sen pyörimisnopeus laskee.
Tämän ilmiön fyysinen merkitys selittyy helposti sähkömagneettisen induktion teorialla: magneetin pyöriessä syntyy pyörivä magneettikenttä, joka indusoi levyssä pyörrevirtoja, jälkimmäisen suuruus riippuu muiden asioiden ollessa yhtä suuri kentän ja levyn suhteellinen nopeus.
Lenzin lain mukaan kiekon tulee pyöriä kentän suuntaan. Kitkan puuttuessa levyn on saatava magneetin nopeutta vastaava kulmanopeus, jonka jälkeen indusoitunut emf katoaa. Todellisessa elämässä kitkaa on väistämättä läsnä ja levy hidastuu.Sen suuruus riippuu levyn kokemasta mekaanisesta jarrutusmomentista.
Levyjen (roottorin) pyörimisnopeuden ja magneettikentän pyörimisnopeuden välinen ero heijastuu moottoreiden nimiin.
Asynkronisten moottoreiden toimintaperiaate:
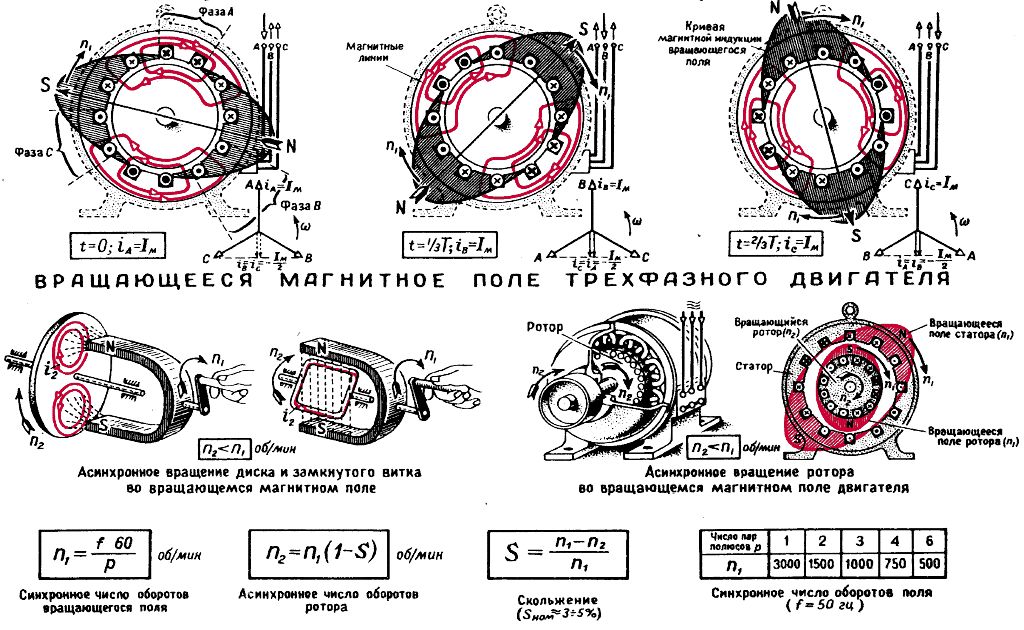
Teknisissä asynkronisissa moottoreissa (useimmiten kolmivaiheisissa) syntyy pyörivä magneettikenttä monivaiheinen virtavirtaa kiinteän staattorikäämin ympäri. Kolmivaihevirran taajuudella on ja staattorikäämien lukumäärä 3p pyörivä kenttä tekee n = f / p kierrosta / sek.

Pyörivä roottori sijaitsee staattorin ontelossa. Sen akseliin voidaan liittää pyörivä mekanismi, jonka yksinkertaisimmissa "oravakenno"-moottoreissa roottori koostuu pitkittäisten metallitankojen järjestelmästä, joka on sijoitettu terässylinterirungon uriin. Johdot on oikosuljettu kahdella renkaalla. Vääntömomentin lisäämiseksi roottorin säde tehdään riittävän suureksi.
Muissa moottorimalleissa (tyypillisesti suuritehoisissa moottoreissa) roottorin johdot muodostavat avoimen kolmivaihekäämin. Kelojen päät oikosuljetaan itse roottorissa ja johdot tuodaan ulos kolmeen roottorin akselille asennettuun ja siitä eristettyyn liukurenkaaseen.
Näihin renkaisiin on liitetty kolmivaiheinen reostaatti liukukoskettimilla (harjoilla), jotka käynnistävät moottorin liikkeessä. Kun moottoria on käännetty, reostaatti poistetaan kokonaan ja roottorista tulee oravahäkki (katso - Asynkroniset moottorit kierretyllä roottorilla).

Staattorin kotelossa on liitinkortti. Staattorin käämit tuodaan niihin. Ne voidaan sisällyttää tähti tai kolmio, riippuen verkkojännitteestä: ensimmäisessä tapauksessa verkkojännite voi olla 1,73 kertaa suurempi kuin toisessa.
Roottorin suhteellista hidastuvuutta oikosulkumoottorin staattorikenttään kuvaavaa arvoa kutsutaan ns. liukastumassa… Se muuttuu 100 %:sta (moottorin käynnistyshetkellä) nollaan (ihanteellinen häviöttömän roottorin liikkeen tapaus).
Induktiomoottorin pyörimissuunnan vaihto saadaan aikaan kytkemällä molempia moottoria syöttävän sähköverkon lineaarijohtimia keskenään.

Oravahäkkimoottoreita käytetään laajalti teollisuudessa. Asynkronisten moottoreiden etuja ovat suunnittelun yksinkertaisuus ja liukukoskettimien puuttuminen.
Viime aikoihin asti tällaisten moottoreiden suurin haittapuoli oli nopeuden säätelyn vaikeus, koska jos staattoripiirin jännitettä muutetaan tätä varten, vääntömomentti muuttuu jyrkästi, mutta syöttövirran taajuuden muuttaminen oli teknisesti vaikeaa. Nykyaikaisia mikroprosessorilaitteita käytetään nykyään laajalti säätämään syöttövirran taajuutta moottoreiden nopeuden muuttamiseksi. taajuusmuuttajat.
Laturit
Laturit on rakennettu merkittävää tehoa ja korkeaa jännitettä varten. Kuten asynkronisissa koneissa, niissä on kaksi käämiä. Normaalisti ankkurikäämitys sijaitsee staattorin kotelossa. Induktorit, jotka luovat ensisijaisen magneettivuon, on asennettu roottoriin ja saavat virtansa herättimestä - pienestä DC-generaattorista, joka on asennettu roottorin akselille. Suuritehoisissa koneissa viritys syntyy joskus tasasuuntautuneesta vaihtojännitteestä.
Ankkurin käämin liikkumattomuudesta johtuen tekniset vaikeudet, jotka liittyvät liukukoskettimien käyttöön suurilla tehoilla, katoavat.
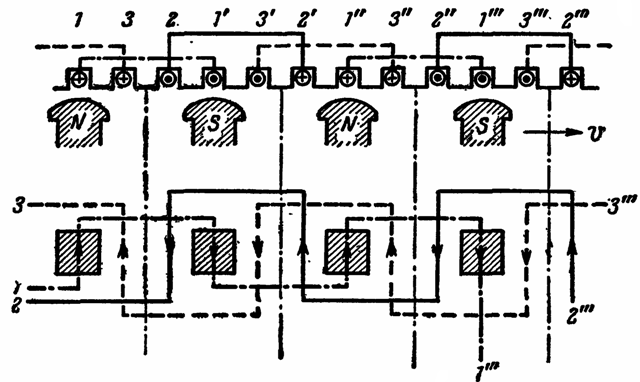
Alla olevassa kuvassa on kaavio yksivaiheisesta generaattorista. Sen roottorissa on kahdeksan napaa. Näissä on kierretyt kelat (ei esitetty kuvassa), jotka syötetään ulkoisesta lähteestä tasavirralla, joka johdetaan roottorin akselille asennettuihin liukurenkaisiin. Napakelat on kierretty siten, että staattoriin päin olevien napojen merkit vuorottelevat. Napojen lukumäärän on oltava parillinen.
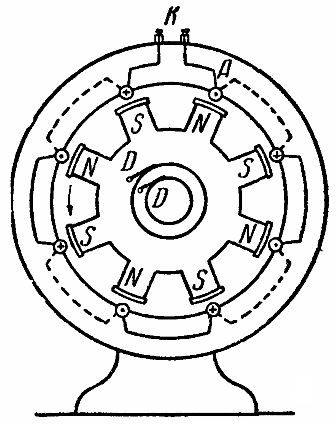
Ankkurin käämitys sijaitsee staattorikotelossa. Sen pitkät toimivat "aktiiviset" johdot, jotka ovat kohtisuorassa piirustuksen tasoon nähden, on esitetty kuvassa ympyröillä, ne ylittävät magneettisen induktion linjat roottorin pyöriessä.
Ympyrät osoittavat indusoituneiden sähkökenttien suuntajen hetkellisen jakauman. Staattorin etupuolella kulkevat liitäntäjohdot on esitetty yhtenäisillä viivoilla ja takapuolella katkoviivoilla. K-puristimia käytetään ulkoisen piirin kytkemiseen staattorin käämiin. Roottorin pyörimissuunta on merkitty nuolella.
Jos leikkaat koneen henkisesti puristimien K välistä sädettä pitkin ja käännät sen tasolle, staattorikäämin ja roottorin napojen suhteellinen sijainti (sivu ja taso) kuvataan kaaviokuvalla:
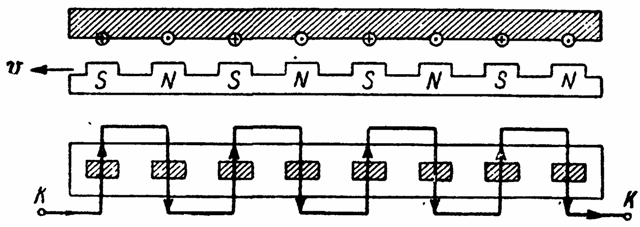
Kuvaa ajatellen varmistamme, että kaikki aktiiviset johdot (johtimet kulkevat induktorin napojen läpi) on kytketty toisiinsa sarjaan ja niissä indusoitunut EMF summataan. Kaikkien EMF:ien vaiheet ovat ilmeisesti samat.Yhden roottorin täydellisen kierroksen aikana jokaisessa johdossa (ja siten ulkopiirissä) saavutetaan neljä täydellistä virran muutosjaksoa.
Jos sähkökoneessa on p napaparia ja roottori pyörii tekemällä n kierrosta sekunnissa, niin koneen vastaanottaman vaihtovirran taajuus on f = pn hz.
Koska EMF:n taajuuden verkossa on oltava vakio, roottoreiden pyörimisnopeuden on oltava vakio. Teknisen taajuuden (50 Hz) EMF:n saamiseksi voidaan käyttää suhteellisen hidasta pyörimistä, jos roottorin napojen lukumäärä on riittävän suuri.
Kolmivaihevirran saamiseksi staattorin runkoon asetetaan kolme erillistä käämiä. Jokainen niistä on siirretty suhteessa kahteen muuhun induktorien vierekkäisten (vastakkaisten) napojen välisestä kaaren etäisyydestä kolmanneksella.
On helppo todeta, että kun induktorit pyörivät, EMF:t indusoituvat keloissa, jotka on siirretty vaiheessa (ajassa) 120 °. Kelojen päät irrotetaan koneesta ja ne voidaan liittää tähtiin tai kolmioon.
Generaattorissa kentän ja johtimen suhteellinen nopeus määräytyy roottorin halkaisijan, roottorin kierrosten määrän sekunnissa ja napaparien lukumäärän perusteella.

Jos generaattoria käyttää vesivirta (hydrogeneraattori), se tehdään yleensä hitailla kierroksilla. Halutun virtataajuuden saavuttamiseksi on tarpeen lisätä napojen määrää, mikä puolestaan vaatii roottorin halkaisijan lisäämisen.
Useista teknisistä syistä tehokkaat vetygeneraattorit niissä on yleensä pystyakseli ja ne sijaitsevat hydrauliturbiinin yläpuolella, mikä saa ne pyörimään.

Höyryturbiinikäyttöiset generaattorit - Turbiinigeneraattorit ovat yleensä suurinopeita. Mekaanisten voimien vähentämiseksi niillä on pieni halkaisija ja vastaavasti pieni määrä napoja.Monet tekniset näkökohdat edellyttävät vaakaakselisten turbiinigeneraattoreiden valmistamista.
Jos generaattoria käyttää polttomoottori, sitä kutsutaan dieselgeneraattoriksi, koska dieselmoottoreita käytetään yleensä halvempaa polttoainetta kuluttavina moottoreina.

Generaattorin käännettävyys, synkroniset moottorit
Jos generaattorin staattorikäämiin syötetään vaihtojännite ulkoisesta lähteestä, induktorin navat ovat vuorovaikutuksessa staattorissa syntyvän virran magneettikentän kanssa ja samasta suunnasta tulevat momentit vaikuttavat. kaikilla navoilla.
Jos roottori pyörii sellaisella nopeudella, että pian puolen vaihtovirran jakson jälkeen kelan seuraava napa (vastapäätä ensimmäistä napaa) mahtuu tarkasteltavan staattorikäämin johdon alle, niin vuorovaikutusvoima sen ja suuntaaan vaihtaneen virran välillä pysyy samana.
Näissä olosuhteissa roottori, joka on jatkuvan vääntömomentin vaikutuksen alaisena, jatkaa liikkumistaan ja pystyy käyttämään mitä tahansa mekanismia. Roottorin liikkeen vastuksen voittaminen tapahtuu verkon kuluttaman energian vuoksi ja generaattorista tulee sähkömoottori.

On kuitenkin huomattava, että jatkuva liike on mahdollista vain tiukasti määritellyllä pyörimisnopeudella, koska siitä poikkeaessa kiihdytysmomentti vaikuttaa osittain roottorin kumpaankin napaan liikkuen roottorin kahden johtimen välillä. staattori, osan ajasta pysähtyy .
Siksi moottorin pyörimisnopeus on määriteltävä tiukasti, — ajan, jonka aikana napa vaihdetaan seuraavaan, on oltava sama kuin virran puolijakso, minkä vuoksi tällaisia moottoreita kutsutaan ns. synkronisesti.
Jos kiinteän roottorin staattorikäämitykseen syötetään vaihtojännite, niin vaikka kaikki roottorin navat virran ensimmäisen puolijakson aikana kokevat samanmerkkisten vääntömomenttien vaikutuksen, inertian vuoksi roottori ei ehdi liikkumaan. Seuraavalla puolijaksolla kaikkien roottorin napojen vääntömomenttien etumerkki muuttuu päinvastaiseksi.
Tämän seurauksena roottori värisee, mutta ei pysty pyörimään. Siksi synkroninen moottori on ensin käämittävä, eli saatettava normaaliin kierrosmäärään, ja vasta sitten staattorin käämityksen virta tulee kytkeä päälle.
Synkronisten moottoreiden kehitys suoritetaan mekaanisilla menetelmillä (pienillä tehoilla) ja erityisillä sähkölaitteilla (suurilla tehoilla).
Pienissä kuorman muutoksissa moottorin nopeus muuttuu automaattisesti mukautumaan uuteen kuormaan. Joten kun moottorin akselin kuormitus kasvaa, roottori hidastuu välittömästi. Siksi vaihesiirto linjajännitteen ja staattorikäämin induktorin indusoiman vastakkaisen indusoidun EMF:n välillä muuttuu.
Lisäksi ankkurireaktio luo induktorien demagnetisoitumisen, joten staattorivirta kasvaa, kelat kokevat lisääntyneen vääntömomentin ja moottori alkaa pyöriä uudelleen synkronisesti ylittäen lisääntyneen kuorman. Samanlainen prosessi tapahtuu kuormituksen vähentämisessä.
Kuorman jyrkillä vaihteluilla tämä moottorin sopeutumiskyky voi olla riittämätön, sen nopeus muuttuu merkittävästi, se "putoaa synkronismista" ja lopulta pysähtyy, kun taas staattoriin indusoitunut EMF katoaa ja virta siinä kasvaa. terävästi. Siksi kuorman voimakkaita vaihteluita on vältettävä. Moottorin pysäyttämiseksi sinun on tietysti ensin irrotettava staattoripiiri ja irrotettava sitten kuristimet; moottoria käynnistettäessä on noudatettava päinvastaista toimintojen järjestystä.
Synkronimoottoreita käytetään useimmiten ohjaamaan mekanismeja, jotka toimivat vakionopeudella. Tässä on synkronisten moottoreiden edut ja haitat sekä niiden käynnistysmenetelmät: Synkroniset moottorit ja niiden sovellukset
Koulutusfilminauha - "Synkroniset moottorit", opetus-visuaalisten apuvälinetehtaan luoma vuonna 1966. Voit katsoa sen täältä: Filmstrip «Synkroninen moottori»
