Automaattiset ohjauspiirit tasavirtamoottoreiden käynnistämiseen ja pysäyttämiseen
 Minkä tahansa moottorin käynnistämiseen liittyy tiettyjä virtapiirin ja ohjauspiirin kytkimiä. Tässä tapauksessa käytetään relekontaktoria ja kosketuksettomia laitteita. DC-moottoreiden rajoittamiseksi käynnistysvirrat moottoreiden roottori- ja ankkuripiirissä on käynnistysvastukset, jotka kytkeytyvät pois päältä, kun moottoreita kiihdytetään portaittain. Kun käynnistys on valmis, käynnistysvastukset ohitetaan kokonaan.
Minkä tahansa moottorin käynnistämiseen liittyy tiettyjä virtapiirin ja ohjauspiirin kytkimiä. Tässä tapauksessa käytetään relekontaktoria ja kosketuksettomia laitteita. DC-moottoreiden rajoittamiseksi käynnistysvirrat moottoreiden roottori- ja ankkuripiirissä on käynnistysvastukset, jotka kytkeytyvät pois päältä, kun moottoreita kiihdytetään portaittain. Kun käynnistys on valmis, käynnistysvastukset ohitetaan kokonaan.
Myös moottoreiden jarrutusprosessi voidaan automatisoida. Pysäytyskomennon jälkeen tehdään rele-kontaktorilaitteiston avulla tarvittavat kytkimet tehopiireihin. Lähestyessä lähellä nollaa olevaa nopeutta moottori kytketään irti verkosta. Käynnistyksen aikana vaiheet sammutetaan säännöllisin väliajoin tai muista parametreista riippuen. Tämä muuttaa moottorin virtaa ja nopeutta.
Moottorin käynnistyksen ohjaus suoritetaan EMF:n (tai nopeuden), virran, ajan ja polun funktiona.
Tyypillisiä osakokoonpanoja ja piirejä DC-moottoreiden automaattiseen ohjaukseen
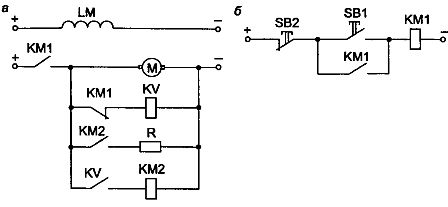
Tasavirtamoottorin käynnistäminen rinnakkaisella tai itsenäisellä virityksellä tehdään ankkuripiiriin lisätyllä vastuksella. Syöttövirran rajoittamiseen tarvitaan vastus. Kun moottori kiihtyy, käynnistysvastus porrastetaan. Kun käynnistys on valmis, vastus ohitetaan kokonaan ja moottori palaa luonnollisiin mekaanisiin ominaisuuksiinsa (kuva 1). Käynnistettäessä moottori kiihtyy keinotekoisen ominaiskäyrän 1, sitten 2 ja vastuksen ohjauksen jälkeen - luonnollisen ominaiskäyrän 3 mukaan.
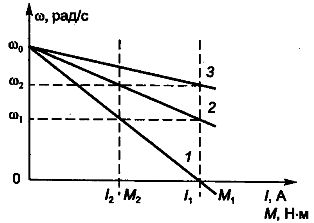
Riisi. 1. Tasavirtamoottorin mekaaniset ja sähkömekaaniset ominaisuudet rinnakkaisviriteellä (ω - pyörimiskulmanopeus; I1 M1 - moottorin huippuvirta ja vääntömomentti; I2 M2 - virta ja kytkentämomentti)
Harkitse DC-moottorin (DCM) käynnistyspiirin solmua EMF-toiminnossa (kuva 2).
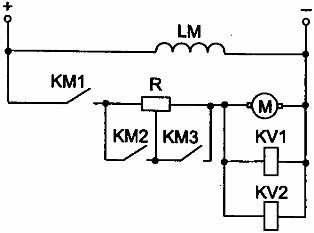
Riisi. 2. Rinnakkaisherätyksen DCT:n aloituspiirisolmu EMF-toiminnossa
EMF (tai nopeus) -toimintoa ohjataan releillä, jännitteillä ja kontaktoreilla. Jännitereleet on konfiguroitu toimimaan eri ankkurin emf-arvoilla. Kun kontaktori KM1 on kytketty päälle, KV-releen jännite käynnistyshetkellä ei riitä toimintaan. Kun moottori kiihtyy (moottorin emf:n kasvun vuoksi), KV1-rele aktivoituu ja sitten KV2 (releen aktivointijännitteillä on vastaavat arvot); ne sisältävät kiihdytyskontaktorit KM2, KMZ ja ankkuripiirin vastukset on shunted (kontaktorin kytkentäpiirejä ei näy kaaviossa; LM on herätekäämi).
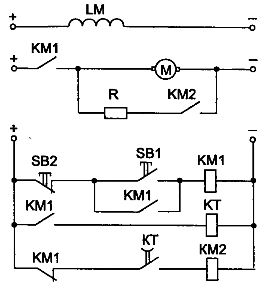
Katsotaanpa kaaviota tasavirtamoottorin käynnistämiseksi EMF-toiminnossa (kuva 3). Moottorin kulmanopeus on usein kiinteä epäsuorasti, ts.mittaamalla nopeuteen liittyviä suureita. Tasavirtamoottorille tällainen arvo on EMF. Aloitus suoritetaan seuraavasti. QF-katkaisija kytkeytyy päälle, moottorikenttä on kytketty virtalähteeseen. KA-rele aktivoi ja sulkee koskettimensa.
Piirin muut laitteet pysyvät alkuperäisissä paikoissaan. Moottorin käynnistämiseksi sinun on painaa nappia SB1 «Start», jonka jälkeen kontaktori KM1 aktivoituu ja kytkee moottorin virtalähteeseen. Kontaktori KM1 on omatehoinen. DC-moottoria kiihdytetään moottorin ankkuripiirin vastuksella R.
Moottorin nopeuden kasvaessa sen emf ja jännite releiden KV1 ja KV2 keloissa kasvavat. Nopeudella ω1 (katso kuva 1.) rele KV1 aktivoituu. Se sulkee kontaktinsa kontaktoripiirissä KM2, joka laukaisee ja oikosulkee käynnistysvastuksen ensimmäisen portaan koskettimellaan. Nopeudella ω2 rele KV2 vetää. Koskettimellaan se sulkee KMZ-kontaktorin syöttöpiirin, joka aktivoituna koskettimella oikosulkee käynnistysvastuksen toisen käynnistysasteen. Moottori saavuttaa luonnolliset mekaaniset ominaisuutensa ja lopettaa nousun.
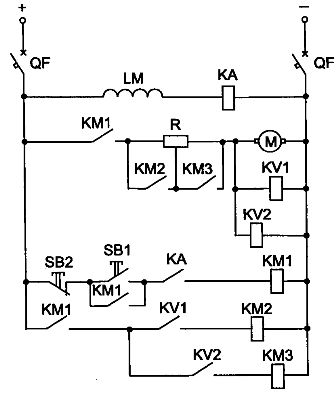
Riisi. 3. Kaavio rinnakkaisen herätteen DCT:n käynnistyksestä EMF-toiminnossa
Piirin oikean toiminnan varmistamiseksi jänniterele KV1 on asetettava toimimaan nopeutta ω1 vastaavalla EMF:llä ja rele KV2 toimimaan nopeudella ω2.
Sammuta moottori painamalla pysäytyspainiketta SB2. Irrota virtapiiri avaamalla QF-katkaisin.
Virtatoimintoa ohjataan virtareleellä. Harkitse tasavirtamoottorin käynnistyspiirin solmua vuofunktiossa. Kuvassa esitetyssä kaaviossaKuviossa 4 käytetään ylivirtareleitä, jotka poikkeavat kytkentävirrasta I1 ja putoavat minimivirralla I2 (katso kuva 1). Virtareleiden sisäisen vasteajan tulee olla lyhyempi kuin kontaktorin vasteaika.
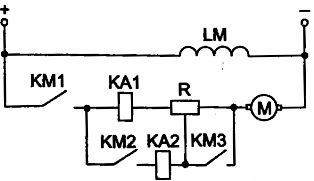
Riisi. 4. Rinnakkaisherätyksen DCT:n aloituspiirin solmu virrasta riippuen
Moottorin kiihdytys alkaa, kun vastus on asetettu kokonaan ankkuripiiriin. Kun moottori kiihtyy, virta pienenee, virralla I2 rele KA1 katoaa ja sulkee koskettimellaan kontaktorin KM2 syöttöpiirin, joka ohittaa käynnistysvastuksen ensimmäisen koskettimen koskettimellaan. Vastaavasti vastuksen toinen käynnistysaste on oikosulussa (rele KA2, kontaktori KMZ). Kontaktorin tehopiirejä ei näy kaaviossa. Moottorin käynnistyksen lopussa ankkuripiirin vastus silloitetaan.
Tarkastellaan DC-moottorin käynnistyspiiriä vuofunktiona (kuva 5). Vastusaskelmien resistanssit valitaan siten, että sillä hetkellä, kun moottori käynnistetään ja portaat shuntataan, ankkuripiirin virta I1 ja hetki M1 eivät ylitä sallittua tasoa.
DC-moottorin käynnistäminen suoritetaan kytkemällä QF-katkaisija päälle ja painamalla «Start»-painiketta SB1. Tässä tapauksessa kontaktori KM1 aktivoituu ja sulkee koskettimet. Syöttövirta I1 kulkee moottorin tehopiirin läpi, jonka vaikutuksesta ylivirtarele KA1 aktivoituu. Sen kosketin avautuu ja kontaktori KM2 ei saa virtaa.
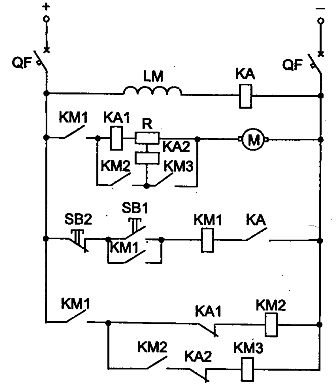
Riisi. 5. Kaavio rinnakkaisherätyksen DCT-käynnistyksestä virran funktiona
Kun virta laskee minimiarvoon I2, ylivirtarele KA1 putoaa ja sulkee koskettimensa.Kontaktori KM2 aktivoituu ja sen pääkoskettimen kautta shuntoidaan käynnistysvastuksen ja releen KA1 ensimmäinen osa. Vaihdettaessa virta nousee arvoon I1.
Kun virta kasvaa jälleen arvoon I1, kontaktori KM1 ei käynnisty, koska kosketin KM2 ohittaa sen kelan. Virran I1 vaikutuksesta rele KA2 aktivoituu ja avaa koskettimensa. Kun kiihdytysprosessissa virta laskee jälleen arvoon I2, rele KA2 putoaa ja kontaktori KMZ kytkeytyy päälle. Käynnistys on valmis, moottori toimii luonnollisilla mekaanisilla ominaisuuksillaan.
Piirin oikean toiminnan kannalta on välttämätöntä, että releen KA1 ja KA2 vasteaika on pienempi kuin kontaktorien vasteaika. Pysäytä moottori painamalla «Stop»-painiketta SB2 ja katkaise virtapiiri katkaisemalla QF-katkaisija.
Aikaohjaus toteutetaan aikareleen ja vastaavien kontaktoreiden avulla, jotka oikosulkevat vastusportaat koskettimillaan.
Tarkastellaan käynnistyspiirin solmun tasavirtamoottoria ajan funktiona (kuva 6) Aikarele KT aktivoituu välittömästi, kun ohjauspiiriin tulee jännite avauskoskettimen KM1 kautta. Koskettimen KM1 avaamisen jälkeen aikarele KT menettää virransyötön ja sulkee kontaktinsa aikaviiveellä. Kontaktori KM2 saa aikareleen aikaviiveen verran aikavälin jälkeen tehon, sulkee koskettimensa ja ohittaa ankkuripiirin vastuksen.
Riisi. 6. Rinnakkaisherätyksen DCT-aloituspiirin solmu ajan funktiona
Ohjauksen etuja ajan funktiossa ovat hallinnan helppous, kiihdytys- ja hidastusprosessin vakaus, sähkökäytön viiveen puute välinopeuksilla.
Tarkastellaan piiriä DC-moottorin rinnakkaisherätyksen käynnistämiseksi ajan funktiona. Kuvassa Kuvassa 7 on kaavio irreversiibelin käynnistyksen DC-rinnakkaisherätemoottorista. Laukaisu tapahtuu kahdessa vaiheessa. Piirissä käytetään painikkeita SB1 «Start» ja SB2 «Stop», kontaktoreita KM1 ... KMZ, sähkömagneettisia aikareleitä KT1, KT2. QF-katkaisin kytkeytyy päälle. Tässä tapauksessa aikareleen KT1 käämi saa virtaa ja avaa koskettimensa kontaktorin KM2 piirissä. Moottori käynnistetään painamalla «Start»-painiketta SB1. Kontaktori KM1 saa virtaa ja kytkee pääkoskettimellaan moottorin virtalähteeseen, jossa on vastus ankkuripiirissä.
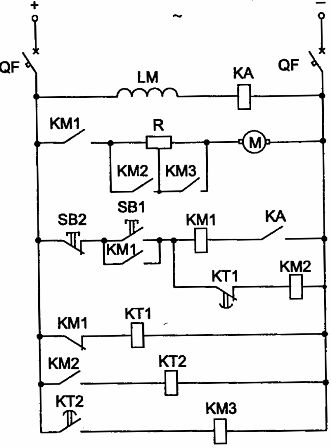
Riisi. 7. Kaavio tasavirtamoottorin palautumattomasta käynnistyksestä ajan funktiona
Alivirtarele KA suojaa moottoria virityspiirin katkeamiselta. Normaalin toiminnan aikana KA-rele vetää ja sen kontaktori KM1-kontaktoripiirissä sulkeutuu valmistaen KM1-kontaktorin toimintaan. Kun herätepiiri katkeaa, KA-rele sammuu, avaa koskettimensa, sitten KM1-kontaktori sammuu ja moottori pysähtyy. Kun kontaktori KM1 aktivoidaan, sen lukituskosketin sulkeutuu ja relepiirin KT1 kosketin KM1 avautuu, joka sammuu ja sulkee kontaktinsa aikaviiveellä.
Releen KT1 aikaviiveen verran aikavälin jälkeen kiihdytyskontaktorin KM2 syöttöpiiri sulkeutuu, joka laukeaa ja oikosulkee pääkoskettimellaan käynnistysvastuksen yhden portaan. Samaan aikaan aikarele KT2 vetää. Moottori kiihtyy. KT2-releen viivettä vastaavan ajan kuluttua KT2-kosketin sulkeutuu, KMZ-kiihdytyskontaktori aktivoituu ja sen pääkoskettimilla on ankkuripiirin käynnistysvastuksen toinen vaihe. Käynnistys on valmis ja moottori palaa luonnollisiin mekaanisiin ominaisuuksiensa.
Tyypilliset DC-jarrun ohjauspiiriyksiköt
Tasavirtamoottorien automaattinen ohjausjärjestelmä käyttää dynaamista jarrutusta, vastasuuntaista jarrutusta ja regeneratiivista jarrutusta.
Dynaamisessa jarrutuksessa on välttämätöntä sulkea moottorin ankkurikäämi lisävastukseen ja jättää virityskäämi jännitteiseksi. Tämä jarrutus voidaan tehdä nopeuden ja ajan funktiona.
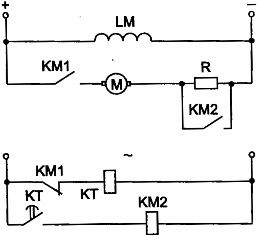
Ohjaus nopeuden (EMF) funktiona dynaamisen jarrutuksen aikana voidaan suorittaa kuvassa 1 esitetyn kaavion mukaisesti. 8. Kun KM1-kontaktori kytketään pois päältä, moottorin ankkuri on irrotettu verkkovirrasta, mutta sen liittimissä on jännite katkaisuhetkellä. Jänniterele KV toimii ja sulkee koskettimensa kontaktorin KM2 piirissä, joka koskettimellaan sulkee moottorin ankkurin vastukseen R.
Lähellä nollaa KV-rele menettää tehonsa. Lisähidastuminen miniminopeudesta pisteeseen tapahtuu staattisen vastusmomentin vaikutuksesta.Jarrutustehokkuuden lisäämiseksi voidaan jarruttaa kahdessa tai kolmessa vaiheessa.
Riisi. 8. EMF-toiminnon dynaamisen jarrutuksen automaattisen ohjauksen piirin solmu: a — virtapiiri; b — ohjauspiiri
Dynaaminen jarrutusvakiomoottorista riippumaton heräte ajan funktiona suoritetaan kuvassa 1 esitetyn kaavion mukaisesti. yhdeksän.
Riisi. 9. DCT-dynaamisen jarrutuspiirin solmu, jossa on riippumaton heräte ajan funktiona
Kun moottori on käynnissä, aikarele KT on päällä, mutta jarrukontaktorin KM2 piiri on auki. Pysäytä painamalla "Stop"-painiketta SB2. Kontaktori KM1 ja aikarele KT menettävät tehonsa; kontaktori KM2 aktivoituu, koska kontaktorin KM2 piirissä oleva kosketin KM1 sulkeutuu ja aikareleen KT kosketin avautuu aikaviiveellä.
Aikareleen ajoitusta varten kontaktori KM2 saa tehon, sulkee koskettimensa ja kytkee moottorin ankkurin lisävastukseen R. Moottorin dynaaminen pysäytys suoritetaan. Lopussa KT-rele avaa jonkin ajan kuluttua koskettimensa ja irrottaa KM2-kontaktorin verkosta. Jatkojarrutus täydelliseen pysähtymiseen suoritetaan vastusmomentin Ms vaikutuksesta.
Käänteisessä jarrutuksessa moottorin EMF ja verkkojännite toimivat sen mukaisesti. Virran rajoittamiseksi piiriin asetetaan vastus.
Tasavirtamoottoreiden viritysohjaus
Moottorin kenttäkäämissä on merkittävä induktanssi ja jos moottori sammutetaan nopeasti, siihen voi ilmaantua suuri jännite, joka aiheuttaa käämin eristyksen rikkoutumisen. Tämän estämiseksi voit käyttää kuvassa 1 esitettyjä piirisolmuja.10. Sammutusvastus kytketään päälle samanaikaisesti virityskelan kanssa diodin kautta (kuva 10, b). Siksi virta kulkee sammutuksen jälkeen lyhyen aikaa vastuksen läpi (kuva 10, a).

Riisi. 10. Sammutusresistanssien päälle kytkemisen piirien solmut: a — jäähdytysvastus on kytketty rinnan; b — sammutusvastus kytketään päälle diodin kautta.
Suojaus virityspiirin keskeytystä vastaan suoritetaan alivirtareleellä kuvassa 1 esitetyn kaavion mukaisesti. yksitoista.

Riisi. 11. Suojaus herätepiirin keskeyttämistä vastaan: a — tehoherätyspiiri; b — ohjauspiiri
Virityskäämin katketessa rele KA jännitteettömäksi ja katkaisee kontaktorin KM piirin.