Kuljettimen käyttöketjut
 Artikkelissa tarkastellaan joidenkin kuljettimien sähkökäyttöjärjestelmiä. Kuvassa Kuvassa 1 on kaavio yksittäisten kuljetinlinjojen sähkökäytöstä, joiden nopeuksien on oltava täysin samat. Tällainen tarve syntyy jatkuvassa tuotannossa, jolloin eri tuotteiden on kohdattava kokoonpanopaikalla tiukasti toistensa mukaisesti tarvittavien teknisten toimenpiteiden jälkeen erillisillä linjoilla.
Artikkelissa tarkastellaan joidenkin kuljettimien sähkökäyttöjärjestelmiä. Kuvassa Kuvassa 1 on kaavio yksittäisten kuljetinlinjojen sähkökäytöstä, joiden nopeuksien on oltava täysin samat. Tällainen tarve syntyy jatkuvassa tuotannossa, jolloin eri tuotteiden on kohdattava kokoonpanopaikalla tiukasti toistensa mukaisesti tarvittavien teknisten toimenpiteiden jälkeen erillisillä linjoilla.
Järjestelmän avulla voit samanaikaisesti käynnistää ja pysäyttää useita kuljetinlinjoja ja säätää niiden nopeutta. Koordinoitu liike saadaan aikaan kytkemällä moottoreita synkronisen akselin mukaan yhteisellä invertteritaajuusmuuttajalla. Moottorien D1 ja D2 nopeudensäätö tapahtuu muuttamalla taajuusmuuttajan nopeutta vaihteiston P avulla.
Kuljettimien käynnistysluvan antavat kuljettajat, jotka valvovat kuljettimien toimintaa kriittisimmillä alueilla. Kun valmiuspainikkeita G1 ja G2 painetaan, merkkivalot LS1 ja LS2 syttyvät ja releet RG1 ja RG2 aktivoituvat. Jälkimmäinen valmistelee releen RP:n käynnistämistä varten.
Kun painat käynnistyspainiketta, RP laukeaa, mikä käynnistää kontaktorin L1. Taajuusmuuttajan asennon D1 ja D2 yksivaiheinen synkronointi. Aikaviiveiden jälkeen kontaktoreihin L1 ja L2 sisäänrakennetut heilurireleet kytkevät vuorotellen L2:n päälle, L1:n pois päältä ja LZ:n päälle. Taajuusmuuttajan moottorin reostaatin käynnistys tapahtuu aikaperiaatteen mukaisesti (aikareleet RU1, RU2, RUZ).
Kuvassa Kuvassa 2 on kaavio metron liukuportaiden sähkökäytöstä, jonka avulla voit työskennellä matkustajien nousun ja laskun parissa. Käyttömoottorina käytetään asynkronista moottoria, jossa on vaiheroottori, jonka teho on enintään 200 kW. Tiettyinä vuorokaudenaikoina, kun matkustajavirtaa ei ole merkittävää, liukuportaat voivat toimia melkein tyhjäkäynnillä pitkään.
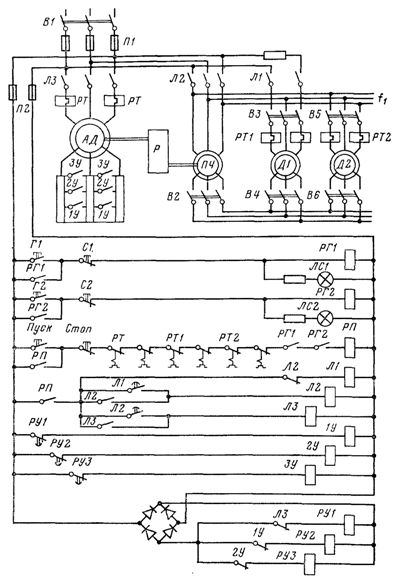
Riisi. 1. Kaavio kuljetinlinjojen sähkökäytöstä koordinoidulla liikkeellä.
Moottorin tehokertoimen ja hyötysuhteen lisäämiseksi, kun sen akselikuorma pienennetään noin 40 %:iin nimellisarvosta, staattorin käämitys kytketään kolmiosta tähtiin. Kun kuormitus kasvaa, se muuttuu takaisin kolmioksi.
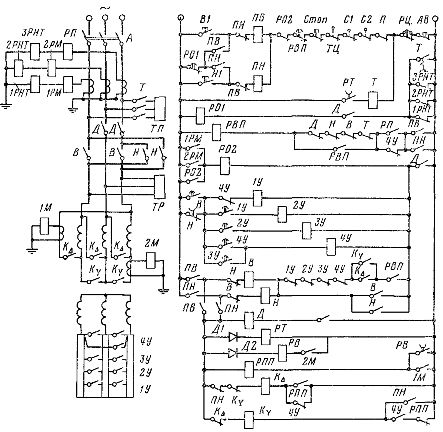
Riisi. 2. Metron liukuportaiden sähkökäytön kaavio.
Mainittu kytkentä tapahtuu automaattisesti ylivirtareleillä 1M ja 2M, jotka ohjaavat k∆- ja kY-kontaktoreita RPP- ja РВ-releiden kautta. Avautumisviive RV-kosketin varmistaa RPP-kelapiirin läsnäolon 2M off - 1M on välillä.
Generaattorin laskeutumistilassa täydellä kuormalla moottoria kuormitetaan huomattavasti vähemmän (asennuksen mekaanisten häviöiden vuoksi) kuin vastaavalla kuormalla nousutilassa.Siksi moottorin staattorin käämitys on riippuvaisessa tilassa aina tähtikytketty. Moottori käynnistetään ajan funktiona kiihdytinkontaktorien 1U-4U heilurireleillä. Pysäytys on mekaaninen. Tässä tapauksessa käyttöjarru TP asennetaan moottorin akselille ja turva-TP vetopyörän akselille varmistamaan, että tikkaat pysähtyvät, jos vaihteen ja moottorin akselien välinen mekaaninen yhteys katkeaa.
Piiri toteuttaa edellisessä osiossa kuvatut tyypilliset turvalukitukset: laitteen mekaanisen osan toimintahäiriöstä - ketjujen ja kaiteiden poistaminen (rajakytkimet TC, P), portaiden rakenteen rikkominen (rajakytkimet C1 ja C2) ), laakereiden liiallinen lämpötila (lämpörele 7), ylinopeudesta (keskipakonopeusrele RC).
Lisäksi tarjotaan moottorin suojaus: maksimi (rele 1RM, 2RM), ylikuormitukselta (rele RP), moottorin tehon katoamiselta (nollavirtarele 1RNT, 2RNT, 3RNT), tehokontaktorien sulkevien koskettimien hitsaukselta ( avaa koskettimet D, Y, B, T käämipiirissä RVP ja 1U-4U käämipiirissä B).
Suojaus tehohäviötä, laakereiden ylikuumenemista ja moottorin ylikuormitusta vastaan toimii aikareleen PO1 ja RVP määräämällä aikaviiveellä. Kaikki suojat kaukosäätimen nopeusrelettä lukuun ottamatta pysäyttävät moottorin irrottamalla sen verkkovirrasta ja painamalla TP-käyttöjarrua. Vasta jarrutusprosessin lopussa, kun PT-releen viive on kulunut umpeen, turvajarru TP aktivoituu lisäksi.Kun RC-nopeusrele aktivoidaan tai hätäpysäytyspainiketta painetaan, molemmat jarrut toimivat samanaikaisesti.