Esimerkki ajoituskaavion ja lohkokaavion laatimisesta mekanismien toiminnasta
Teknisten linjojen ohjauskaavioissa lähtöelementtien tila, ts. toimilaitteet (sähkömagneettiset releet, magneettikäynnistimet, puolijohdereleet jne.), ei määräydy vain tulo- tai vastaanottoelementtien (painikkeet, anturit jne.) yhdistelmän, vaan myös niiden muutosjärjestyksen perusteella.
Suunnitellun teknologisen prosessin sanallinen kuvaus voidaan esittää tulo- ja lähtösignaalien muutosten aikatauluna, jota kutsutaan teknologisen prosessin aikakaavioksi.

Esimerkki ajoituskaavion rakentamisesta tehdään viljan esipuhdistusviivakaavion perusteella.
Piirin toiminnan kuvaus
Käyttötapa valitaan SA1-kytkimellä: automaattinen — pääkäyttötila, manuaalinen — käyttöönottotila.
Käyttöönottotila koostuu virran syöttämisestä lukituspainikkeiden SB4-SB6 kautta lineaaristen mekanismien magneettikäynnistimien keloihin, ohittaen kaiken ohjauslogiikan. Tässä tilassa käyttäjä päättää itse linjan pituuden tai jonkin erillisen mekanismin, suppilon täyttöä ohjataan vain visuaalisesti.
Pääsääntöisesti tätä toimintatapaa käytetään joko hätäkäyttötiloissa, kun ohjauslogiikka on rikki ja tekninen prosessi on suoritettava loppuun menettämättä tuotetta linjalla, tai käyttöönoton aikana, kun jonkin mekanismin korjauksen jälkeen linjalla on tarpeen käynnistää vain se, ei kaikkia lineaarisia mekanismeja.
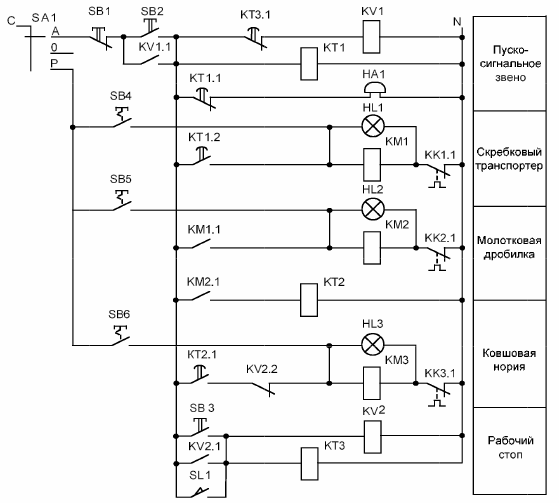
Riisi. 1. Viljan esipuhdistuslinjan rele-kosketinohjauspiiri
Käyttötapakytkimen jälkeen ohjauspiiriin sisältyy käynnistysmerkinantolohko, joka mahdollistaa aikaviiveellä kellon sammuttamisen ja kaavinkuljettimen käynnistämisen samanaikaisesti. Rele-koskettimia muodostettaessa mekanismien päälle- tai poiskytkentä suoritetaan magneettisten käynnistimien sulkemiskoskettimien avulla.
Joten meidän tapauksessamme, jos magneettikäynnistimen KM1 (kaavinkuljetin) kelassa on energiaa vastaavasti koskettimen KM1.1 kautta, teho on myös magneettikäynnistimen KM2 (vasara) kelassa.
Samanaikaisesti on epäkäytännöllistä käynnistää linjan kaikkia mekanismeja, koska käytön aikana tällainen toimintatila voi esiintyä, kun linjan kahden mekanismin sähkökäytöt eivät ole vielä saavuttaneet nimellistä toimintatapaansa ja tuote on toimitetaan heille päämekanismin kautta, mikä johti linjan hätäpysäytymiseen. Siksi ohjauspiirissä virtaa syötetään päämekanismin magneettikäynnistimen KM3 kelaan aikareleen KT2 toteuttamalla aikaviiveellä.
Lineaariset mekanismit ovat käytössä, työ on käynnissä. Joskus käytön aikana tulee hetki, jolloin suppilo ei ole vielä täynnä ja linja on kytkettävä pois päältä. Tässä tapauksessa ohjausjärjestelmässä käytetään "työpysäytys"-lohkoa, jonka avulla on mahdollista sammuttaa kaikki linjan mekanismit oikeassa järjestyksessä (tuotteen liikkeen suuntaan linjaa pitkin).
Joten kun SB3-painiketta painetaan, välirele KV2 kytkeytyy päälle, jonka avauskosketin KV2.2 katkaisee piirin käämin KM3 kanssa, linjapäämekanismi sammuu. Samalla aikarele KT3 laatii raportin linjan toiminta-ajasta mekanismien puhdistamiseksi tuotteesta.
Tietyn ajan kuluttua aikareleen KT3.1 kosketin katkaisee piirin välireleen KV1 kanssa, jonka kosketin ohittaa käynnistyspainikkeen. Tämä saa koko ohjauspiirin pysähtymään ja sen seurauksena lineaariset mekanismit pysähtymään. Samanlainen algoritmi ohjauspiirin toiminnalle, kun tasoanturi laukaistaan SL1-suppilossa.
Lineaaristen sähkömoottoreiden suojaus ylikuormitukselta esitetyssä ohjauskaaviossa suoritetaan lämpöreleiden KK1.1 ... KK3.1 katkaisukoskettimilla, jotka on asennettu vastaavasti sarjaan piireihin, joissa on magneettikäynnistimien KM1 käämit. KM3.
Ohjauspiirin lineaaristen mekanismien toiminnan visuaalista ohjaamista varten on merkkivalot HL1 ... HL3. Lineaaristen mekanismien normaalissa toiminnassa merkkivalot syttyvät. Hätäpysäytystapauksessa virta katkeaa magneettikäynnistimen piiristä ja merkkivalo sammuu vastaavasti.
Sähköisen pääautomaattikäyttötavan kaavion mukaan viljan esipuhdistuslinjaan tarvitaan 3 painiketta: SB1 «Stop», SB2 «Start» ja SB3 «Work stop» sekä tasoanturi SL1. Siten meillä on 4 syöttöelementtiä. Myös painikkeet hyväksytään palautuksella, ts. ilman käynnistystilan korjaamista.
Esimerkki aikakaavion rakentamisesta
Lähtökohdat 4: kello HA1, kaavinkuljetin KM1, vasaramurskain KM2 ja kauhahissi KM3.
Kun SB2 «Start»-painiketta painetaan, ensimmäisen laukaisulinkin (kello HA1) tulee aktivoitua 10 sekunniksi varoittaakseen henkilökuntaa prosessilinjan käynnistymisestä.
HA1:n kellon soidessa, ts. 10 sekuntia "Start"-painikkeen SB2 86 painamisen jälkeen kaavinkuljetin KM1 ja iskumurskain KM2 kytkeytyvät päälle (katso kuva 2).
Mekanismien työaika määräytyy niiden tuottavuuden ja tuotantomäärän perusteella Kaavinkuljettimen, vasaramurskaimen ja kauhaelevaattorin tuottavuus on 5 t/h, 3 t/h ja 2 t/h. Viljatilavuus määritetään Perustuu suppilon tilavuuteen ja viljakiloon 1 m3 kohti.
Eri viljelykasvien viljalla on eri muoto, tiheys ja vastaava paino, joten kuutiometri kutakin viljalajia ei voi painaa yhtä paljon.
Otetaan bunkkerin tilavuus 5 m. Ladattu vilja on tattaria, joka painaa 560 - 660 kg. Roskakorin alkutila on tyhjä. Sitten viljan määrä täyteen astiaan: N = 580 x 5 = 2900 kg.
Kauhahissillä on alhaisin tuottavuus kaikista mekanismeista; hän toimittaa myös viljaa linjalle. Sen työaika on: Tm3 = 2000/2900 = 0,689 h = 41 min.
Muiden mekanismien toiminta-aika on yli 41 minuuttia ja se määräytyy piirin logiikan perusteella.
Kun kaavinkuljetin KM1 ja iskumurskain KM2 on kytketty päälle, niille on annettava aikaa kiihtyä. Kaikkien mekanismien kiihtyvyysaika on 10 sekuntia. Kauhanostin KM3 käynnistetään viimeisenä (10 sekuntia KM1:n ja KM2:n käynnistyksen jälkeen), jotta ei muodostu tuotetukoksia vasaramurskaimeen KM2 ja kaavinkuljettimeen KM1. 41 minuutin kuluttua kaikki suppilon täyttämiseen tarvittava tuote kulkee KM3-kauhahissin läpi.
SL-tasoanturi asennetaan siten, että suppilon täyttösignaali vastaanotetaan jo ennen kuin tuotejäämät kulkevat vasaramurskaimen KM2 ja kaavinkuljettimen KM1 läpi.
Kun SL1-tasoanturi käynnistetään, KM3-päämekanismi sammuu (41 minuutin ja 20 sekunnin kuluttua SB2 «Start»-painikkeen painamisesta). Aikaviiveellä KM1 ja KM2 sammuvat samanaikaisesti. Tämän viiveen voidaan olettaa olevan 20 sekuntia.
Normaalin toiminnan ajoituskaavio on esitetty kuvassa 2.
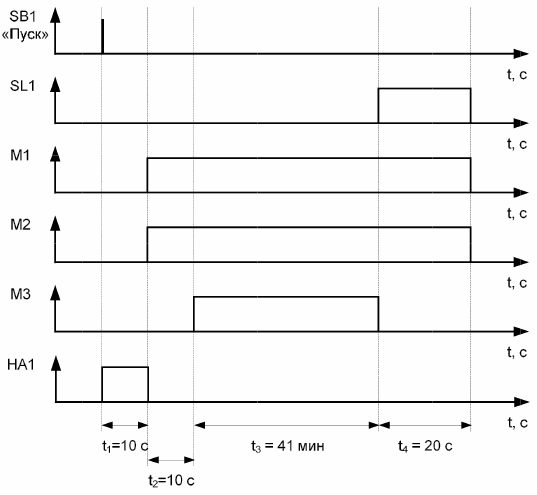
Riisi. 2. Ajoituskaavio normaalia toimintaa varten
«Toimintapysäytys» -tilassa käyttäjä voi pysäyttää prosessin ennen tasoanturin SL1 laukaisua, joten tässä tapauksessa on mahdotonta määrittää mekanismien toiminta-aikaa. «Yleinen pysäytys» -tilassa kaikki mekanismit deaktivoituvat välittömästi.
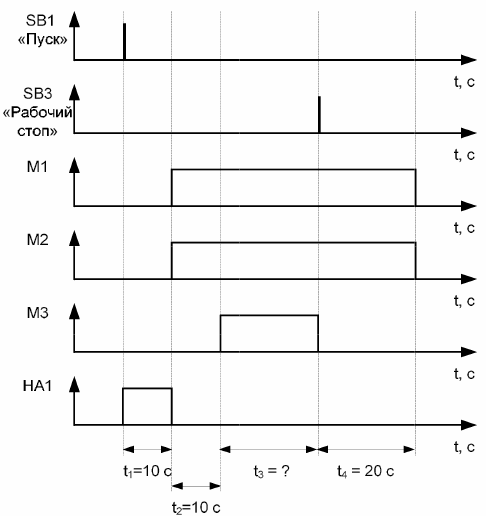
Riisi. 3. Ajoituskaavio «Käyttöpysäytys»-toimintatilan käyttöön
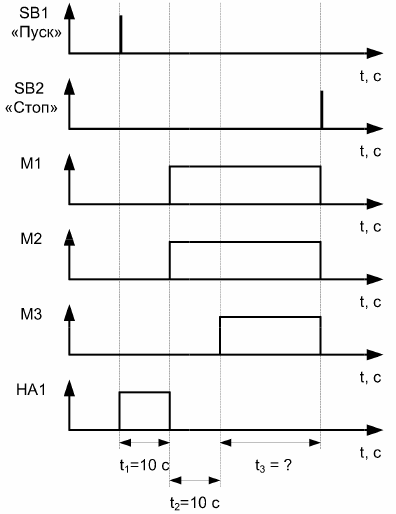
Riisi. 4. Ajoituskaavio «Total stop» -moodille
Esimerkki mekanismien toiminnan lohkokaavion rakentamisesta
Teknologisen prosessin lohkokaaviossa on selkeästi esitettävä sen työskentelyn algoritmi, jota varten käytetään tiettyjen toimintojen erityisiä nimityksiä.
Kuvassa 5 on esimerkki lohkokaaviosta viljan esipuhdistuslinjasta. Esitetty lohkokaavio esittää kaikki mahdolliset vaihtoehdot teknologisen prosessin toiminnalle. "Onnettomuus"-tilanne voi tapahtua milloin tahansa viljan esipuhdistuslinjan käytön aikana "Käynnistys"-painikkeen SB2 painamisen jälkeen.
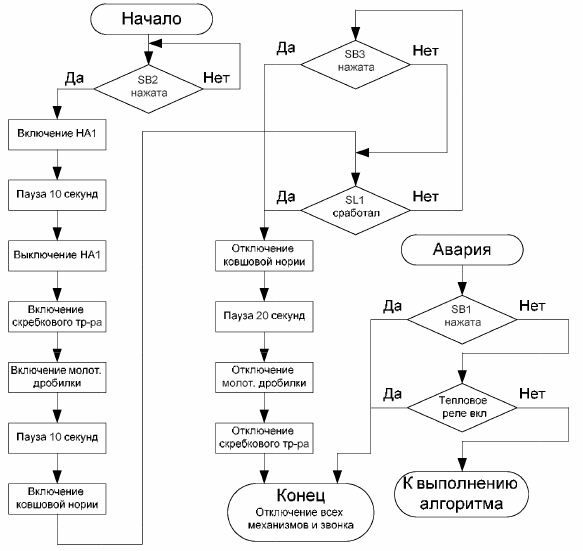
Riisi. 5. Viljojen esipuhdistuslinjan lohkokaavio