Moottorin kierrosluvun säätölaitteet
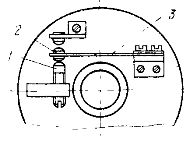
Asynkronisia sähkömoottoreita käytetään laajalti vastavirtajarrupiireissä. induktionopeuden säätörele... Releen 5 tuloakseli, johon on asennettu sylinterimäinen kestomagneetti 4, on kytketty sähkömoottorin akseliin, jonka kulmanopeutta halutaan ohjata.
Sähkömoottorin pyöriessä magneettikenttä ylittää pyörivän staattorin 6 oikosulun 3 johtimet. Käämitykseen indusoituu EMF, jonka arvo on verrannollinen akselin pyörimiskulmanopeuteen. Sen vaikutuksesta kelaan ilmaantuu virta ja syntyy vuorovaikutusvoima, joka pyrkii pyörittämään staattoria 6 magneetin pyörimissuuntaan.
Tietyllä pyörimisnopeudella voima kasvaa niin paljon, että rajoitin 2, voittamalla litteän jousen vastuksen, kytkee releen koskettimet. Rele on varustettu kahdella kosketinsolmulla: 1 ja 7, jotka kytketään pyörimissuunnan mukaan.
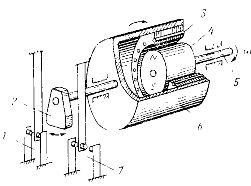
Kuva 1. Induktiivinen nopeudensäätörele
Induktionopeuden säätöreleellä on melko monimutkainen rakenne ja alhainen tarkkuus, joka voidaan hyväksyä vain karkeissa ohjausjärjestelmissä. Suurempi nopeudensäätötarkkuus voidaan saavuttaa käyttämällä takogeneraattoria - mittausmikrokonetta, jonka liittimissä oleva jännite on suoraan verrannollinen pyörimisnopeuteen.
Tachogeneraattoreita käytetään säädettävänopeuksisissa käyttötakaisinjärjestelmissä, joissa on laaja kierroslukualue, ja siksi niiden virhe on vain muutaman prosentin. Yleisimmät ovat DC-takogeneraattorit.
Kuvassa Kuvassa 2 on kaavio kierrosluvun säätöreleestä sähkömoottorille M, jossa käytetään takogeneraattoria G, jonka ankkuripiiriin kuuluu sähkömagneettinen rele K ja säätöreostaatti R. Kun jännite takogeneraattorin ankkuriliittimissä ylittää käyttöjännitteen, taajuusmuuttajan ankkuriliittimien jännite ylittää käyttöjännitteen. rele on kytketty päälle ulkoisessa piirissä.
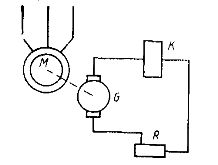
Kuva 2. Takogeneraattorilla varustettu nopeudensäätörele
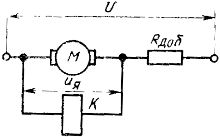
 Kuva 3. Kaavio kierroslukumittarisillasta
Kuva 3. Kaavio kierroslukumittarisillasta
Kun ankkuripiirin vastus kasvaa, piirin tarkkuus kasvaa. Siksi joskus rele on kytketty takogeneraattoriin välipuolijohdevahvistimen kautta. Tähän tarkoitukseen on myös mahdollista käyttää kontaktittomia puolijohdekynnyselementtejä, joilla on vakaa vastejännite.
Piirin luotettavuutta voidaan parantaa korvaamalla DC-takogeneraattori kosketuksettomalla asynkronisella takogeneraattorilla.
Asynkronisessa takogeneraattorissa on ontto ei-magneettinen roottori, joka on valmistettu lasin muodossa. Staattorissa on kaksi käämiä 90° kulmassa toisiinsa nähden. Yksi keloista on kytketty vaihtovirtaverkkoon.Toisesta käämityksestä poistetaan sinimuotoinen jännite, joka on verrannollinen roottorin nopeuteen. Lähtöjännitteen taajuus on aina yhtä suuri kuin verkkovirran taajuus.
 Nykyaikaisissa DC Executive -moottoreissa takogeneraattori on rakennettu samaan koteloon kuin kone ja se on asennettu samalle akselille kuin päämoottori. Tämä vähentää lähtöjännitteen aaltoilua ja parantaa nopeuden säätelyn tarkkuutta.
Nykyaikaisissa DC Executive -moottoreissa takogeneraattori on rakennettu samaan koteloon kuin kone ja se on asennettu samalle akselille kuin päämoottori. Tämä vähentää lähtöjännitteen aaltoilua ja parantaa nopeuden säätelyn tarkkuutta.
PBST-sarjan sähkömoottoreissa käytetään yleisesti PT-1-tyypin DC-takogeneraattoreita, joissa on sähkömagneettinen heräte. Korkea vääntömomentti DC moottorit Minulla on sisäänrakennettu kestomagneettiherätetty tacho.
Tapauksissa, joissa tasavirtamoottorissa M ei ole takogeneraattoria, sen nopeutta voidaan säätää mittaamalla ankkurin EMF. Tätä varten käytetään takometristä siltapiiriä, joka muodostuu kahdesta vastuksesta: R1 ja R2, ankkuri Ri ja koneen Rdp lisänavat. Takometrisillan lähtöjännite Uout = U1 — Udp tai
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
Viimeinen yhtälö pätee sillä ehdolla, että sähkömoottorin magneettivuo on vakio. Sisältää kynnyselementin takometrisen sillan lähdössä, saadaan rele, joka on asetettu tiettyyn pyörimiskulmanopeuteen. Takometrisillan tarkkuus on alhainen johtuen harjan kosketusvastuksen vaihtelusta ja vastuksen lämmitysepätasapainosta.
Jos tasavirtamoottori toimii keinotekoisella ominaiskäyrällä ja ankkuriin sisältyy suuri lisävastus, nopeusreletoiminto voidaan suorittaa ankkurin napoihin kytketyllä jännitereleellä.
Jännite sähkömoottorin ankkurissa Uja = E + IjaRja.
Koska I = (U — E) / (Ri + Rext), saamme Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U, niin toinen termi voidaan jättää huomiotta. ja ankkuriliittimen jännitettä voidaan pitää suoraan verrannollisena emf:iin ja moottorin pyörimisnopeuteen.
Kuva 4. Nopeudensäätö jännitereleillä
 Kuva 5. Keskipakonopeuden säätörele
Kuva 5. Keskipakonopeuden säätörele
Niillä on hyvin yksinkertainen muotoilu. keskipakonopeuden kytkimet... Releen pohjana on muovinen etulevy 4, joka on asennettu akselille, jonka pyörimisnopeutta on säädettävä. Etulevyyn on kiinnitetty litteä jousi 3, jossa on massiivinen liikkuva kosketin 2 ja kiinteä säädettävä kosketin 1. Jousi on valmistettu erikoisteräksestä, jonka kimmokerroin on käytännössä riippumaton lämpötilan muutoksista.
Kun etulevy pyörii, liikkuvaan koskettimeen vaikuttaa keskipakovoima, joka tietyllä pyörimisnopeudella voittaa litteän jousen vastuksen ja kytkee koskettimet. Virta syötetään kosketinlaitteeseen liukurenkaiden ja harjojen kautta, joita ei näy kuvassa. Tällaisia releitä käytetään DC-mikromoottorien nopeudenvakautusjärjestelmissä. Yksinkertaisuudestaan huolimatta järjestelmä ylläpitää nopeutta noin 2 %:n virheellä.
