Intuitiivinen menetelmä ohjausjärjestelmien suunnitteluun
 Intuitiivinen menetelmä – menetelmä ohjausjärjestelmien kehittämiseksi, joka perustuu eri suunnitteluorganisaatioissa erilaisten mekanismien automatisoinnista saatuun kokemukseen. Se perustuu suunnittelijan insinööri-intuitioon.
Intuitiivinen menetelmä – menetelmä ohjausjärjestelmien kehittämiseksi, joka perustuu eri suunnitteluorganisaatioissa erilaisten mekanismien automatisoinnista saatuun kokemukseen. Se perustuu suunnittelijan insinööri-intuitioon.
Vain se, joka on imenyt kaiken aikaisemman kokemuksen ja jolla on tiettyjä kykyjä laatia suunnitelmia, joka osaa ajatella abstraktisti ja järkeillä loogisesti, voi hallita tätä menetelmää täydellisesti. Monimutkaisuudestaan huolimatta useimmat sähkösuunnittelijat käyttävät intuitiivista menetelmää laajasti.
Harkitse esimerkiksi työntövivun yksinkertaistettua kinemaattista kaaviota (kuva 1). Kun pyörä 5 pyörii myötäpäivään, vipu 4 pyörittää vipua 1 akselin O ympäri, pakottaen siten kengän 3 vivulla 2 kääntymään. Pyörän 5 pyöriessä edelleen vivun 1 liikesuunta muuttuu ja kenkä palaa alkuperäiseen asentoonsa, minkä jälkeen moottorin on pysähdyttävä.
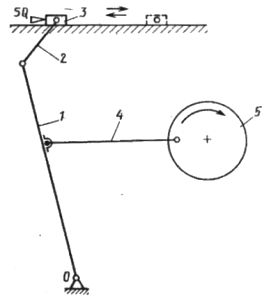
Riisi. 1. Kaaviokaavio vivun työntöohjaimesta
Tarkasteltu mekanismi on tyypillinen työntölaitteen edustaja.Ensimmäisellä jaksolla mekanismi on päällä ja käynnissä. Toisessa mittakaavassa se ei toimi. Jaksoa, jossa mekanismi ei toimi, kutsutaan nollaksi. Vaikka kenkä liikkuu täysin edestakaisin (eteen- ja taaksepäin), työntövoimana voidaan käyttää ei-käännettävää sähkömoottoria.
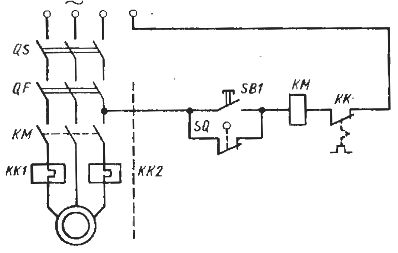
Vipumäntäsähkömoottorin ohjauspiiri koostuu kahdesta osasta (kuvassa 1 ne on erotettu katkoviivalla): tehopiiristä ja ohjauspiiristä.
Harkitse virtapiirin elementtien tarkoitusta. Kolmivaihevirta syötetään QS-kytkimeen, joka katkaisee sähkömoottorin virransyötön, jos magneettikäynnistin korjataan tai vahingoittuu. Sitten virta kulkee katkaisijan läpi, jonka QF-vapautus näkyy kaaviossa. Se on suunniteltu suojaamaan ja katkaisemaan taajuusmuuttajan virransyöttö oikosulkuvirtojen varalta. Magneettisen käynnistimen KM pääkoskettimet kytkevät päälle tai pois sähkömoottorin M käämityksen.
Lämpöreleet KK1 ja KK2, joiden lämmityselementit on esitetty tehopiireissä, on suunniteltu suojaamaan sähkömoottoria pitkittyneiltä ylikuormituksilta:
Ohjausjärjestelmä toimii seuraavasti. Kun painat käynnistyspainiketta SB1, magneettikäynnistimen KM kela saa jännitteen ja siksi KM:n syöttöpiirin koskettimet sulkeutuvat ja sähkövirta tulee moottorin käämiin. Moottorin roottori pyörii ja rumpu alkaa liikkua eteenpäin. Samalla se siirtyy pois rajakytkimen SQ vivusta ja sen koskettimet ovat kiinni.
Kun käynnistyspainike SB1 vapautetaan ja sen koskettimet avautuvat, magneettikäynnistimen KM-käämi saa virtaa rajakytkimen SQ koskettimien kautta.Eteenpäin ja sitten taaksepäin siirtymisen jälkeen mäntä painaa rajakytkimen SQ vipua, sen koskettimet avautuvat ja KM:n kela sammuu. Tämä saa virtapiirin KM-koskettimet avautumaan ja pysäyttämään sähkömoottorin.
Tarkasteltava piiri sisältää teho- ja ohjauspiirit. Jatkossa vain valvontajärjestelmiä harkitaan.
Toiminnan mukaan, ts. tarkoituksen mukaan kaikki piirin toimintaan osallistuvat elementit voidaan jakaa kolmeen ryhmään: ohjauskoskettimet, välielementit ja toimeenpanoelementit.
Ohjauskoskettimet ovat elementtejä, joilla komennot annetaan (ohjauspainikkeet, kytkimet, rajakytkimet, ensiömuuntimet, relekoskettimet jne.).
Jo välielementtien nimi osoittaa, että ne ovat väliasemassa ohjaus- ja toimeenpanoelementtien välissä. Relekontaktipiireissä ne sisältävät aikareleet ja välireleet, ja kosketuksettomissa piireissä — logiikka portit.
Toimeenpanoelementit ovat toimeenpanomekanismeja. Ohjauspiirejä kehitettäessä ei kuitenkaan käytetä itse käyttömekanismeja (sähkömoottoreita tai lämmityselementtejä), vaan niitä sisältäviä laitteita, ts. magneettikäynnistimet, kontaktorit jne.
Kaikki ohjauskoskettimet on toimintaperiaatteensa mukaan jaettu viiteen tyyppiin: käynnistyskosketin lyhyellä toiminnalla (PC), aloituskontakti pitkällä toiminnalla (PD), pysäytyskosketin lyhyellä toiminnalla (OK), pysäytyskosketus pitkällä toiminnalla (OD) ), start-stop-kosketin (ohjelmisto). Näitä yhteystietoja kutsutaan tärkeimmiksi.
Syklogrammit kaikkien tyypillisten koskettimien toiminnasta syklisten mekanismien ohjauksessa on esitetty kuvassa. 2.
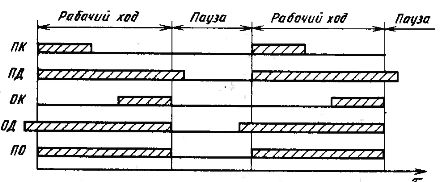
Riisi. 2.Ohjauskoskettimien syklogrammi
Jokainen viidestä koskettimesta alkaa toimia (sulkeutuu) ja päättyy (avautuu) tiettynä hetkenä. Joten käynnistyskoskettimet aloittavat toimintansa yhdessä työiskun alkamisen kanssa, mutta YAK-kosketin lakkaa toimimasta työiskun aikana, OD — tauon aikana, eli ne eroavat toisistaan vain sammutushetkellä ( avaaminen).
Pysäytyskoskettimet, jotka, toisin kuin käynnistyskoskettimet, lakkaavat toimimasta samaan aikaan työskentelyn päättymisen kanssa, eroavat sisällyttämisen (sulkemisen) hetkistä. Pysäytyskosketin OK aloittaa toimintansa työiskun aikana ja kosketin OD - tauon aikana. Vain ohjelmiston kontakti aloittaa työnsä työkurssin alussa ja päättyy sen loppuun.
Tarkastelun viiden pääkoskettimen avulla on mahdollista saada neljä järjestelyä toimeenpano- ja välielementtien ohjaamiseksi, joita kutsutaan tyypillisiksi skeemoiksi (kuva 3).

Riisi. 3. Tyypilliset ohjauskaaviot toimeenpano- ja välipiireille
Ensimmäisessä tyypillisessä piirissä (kuva 3, a) on vain yksi ohjelmistoohjauskosketin. Jos se on kiinni, sähkövirta kulkee toimilaitteen X läpi, ja jos se on auki, virtaa ei kulje. PO-koskettimella on oma merkityksensä ja kaikkia muita kontakteja tulee käyttää pareittain (aloitus ja lopetus).
Toisessa tyypillisessä piirissä on kaksi jatkuvatoimista ohjauskosketinta: PD ja OD (kuva 3, b).
Kolmas tyypillinen piiri koostuu tietokoneen käynnistyskoskettimesta ja pysäytyskoskettimesta OD, ohjauskoskettimien lisäksi tähän piiriin tulee sisältyä lukituskosketin x, jonka kautta toimilaite X jatkaa virran saamista koneen käynnistyskoskettimen jälkeen. tietokone avataan (kuva 3, c).
Neljäs tyypillinen kaavio perustuu kahteen lyhytaikaiseen kosketukseen: käynnistä tietokone ja pysäytä OK, kytketty rinnan (kuva 3, d).
Annetut neljä tyypillistä mallia mahdollistavat (ikään kuin kuutioista) monimutkaisten rinnakkaissarjakaavioiden muodostamisen koskettimien ohjaamiseksi. Joten esimerkiksi tarkasteltavana oleva vivun ohjauskaavio (katso kuva 1) perustuu neljänteen tyypilliseen kaavioon. Se käyttää painikkeita SB1 lyhytaikaisena käynnistyskoskettimena ja SQ-rajakytkintä lyhytaikaisena pysäytyskoskettimena.
Kun laaditaan ohjauskaavio intuitiivisella menetelmällä, on tarpeen määrittää oikein ohjauskoskettimen tyyppi, eli sen toiminnan kesto.
Harkitse esimerkkiä ohjausjärjestelmän kehittämisestä käyttämällä intuitiivista menetelmää käyttäen tyypillisiä järjestelmiä.
Olkoon tarpeen kehittää puoliautomaattinen laite induktorin ohjaamiseen ja laite ruiskutukseen, joka on suunniteltu tuotteen lämmittämiseen suurtaajuisilla virroilla ja sen jälkeen jäähdyttämiseen vesisuihkuilla. Tuotteen lämmitysaika kelassa on 12 s ja jäähdytysaika 8 h. Tuote asennetaan manuaalisesti kelaan.
Ensin analysoimme puoliautomaattisen laitteen toiminnan ja määritämme kaikki toimeenpano- ja välielementit. Työntekijä asentaa tuotteen manuaalisesti kelaan ja painaa käynnistyspainiketta.Tässä vaiheessa kela kytkeytyy päälle ja tuotteen lämmitys alkaa. Samalla aikareleen tulisi myös kytkeytyä päälle ottaen huomioon lämmitysaika (12 s).
Tämä aikarele (tarkemmin sen koskettimet) sammuttaa induktorin ja käynnistää sprinklerin, joka toimittaa vettä jäähdytykseen. Samanaikaisesti on kytkettävä toinen rele päälle jäähdytysajan laskemiseksi eli ruiskun sammuttamiseksi. Tällä tavalla on tarpeen ohjata neljää elementtiä: kela, ruiskulaite ja kaksi aikarelettä.
Induktori kytketään päälle ja pois kontaktorin kautta, minkä vuoksi jälkimmäistä on ohjattava. Ruiskua ohjataan solenoidiventtiilillä.
Nimetään kontaktorin KM1 käämi (käämi), magneettiventtiilin KM2 käämi ja aikareleen KT1 ja K.T2 kelat vastaavasti. Meillä on siis kaksi toimilaitetta: KM1 ja KM2 sekä kaksi välielementtiä: KT1 ja KT2.
Suoritetusta analyysistä seuraa, että lämmityksen tulisi alkaa ensin, eli käämi KM1 kiihtyy. SB-laukaisupainiketta (lyhyttoiminto) käytetään käynnistyskoskettimena. Siten joko kolmatta tai neljättä tyypillistä järjestelmää voidaan soveltaa.
Olkoon kela irrotettu aikareleen KT1.1 koskettimista, jotka tässä tapauksessa ovat pitkävaikutteisia koskettimia. Siksi valitsemme kolmannen tyypillisen järjestelmän. Samanaikaisesti magneettikäynnistimen KM1 käämityksen kanssa on kytkettävä päälle aikarele KT1, mikä on erittäin helppo tehdä kytkemällä ne rinnan.
Harkitse tuloksena olevan piirin toimintaa (kuva 4, a).
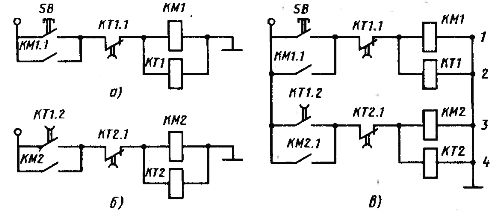
Riisi. 4.Ohjauspiirit: a — induktori ja lämmitysajan rele, b — sprinklerilaite ja releen jäähdytysaika, c — asennus kokonaisuudessaan
Kun painat käynnistyspainiketta SB, kontaktorin KM1 käämi vetää, eli tuotteen lämmitys alkaa. Samalla aikareleen KT1 kela vetää ja alkaa laskea lämmitysaikaa alaspäin. Lukituskoskettimen KM1.1 avulla kelan KM1 jännite säilyy myös liipaisupainikkeen SB vapauttamisen jälkeen, ts. sen koskettimien avaamisen jälkeen.
Lämmitysajan päätyttyä aikarele KT1 toimii ja sen kosketin KT1.1 avautuu. Tämä aiheuttaa KM1-käämin sammumisen (tuotteen kuumeneminen päättyy). Ruiskun pitäisi nyt olla päällä. Se voidaan kytkeä päälle aikareleellä KT1 sulkemalla kosketin. Kun ruisku käynnistetään, aikarele KT1 kytkeytyy pois päältä. Siksi sulkeva kosketin KT1.1 on lyhytaikainen kosketin. Siksi käytämme jälleen kolmatta tyypillistä järjestelmää.
Samanaikaisesti ruiskun kanssa on kytkettävä päälle aikarele KT2, joka laskee jäähdytysaikaa. Tätä tarkoitusta varten käytämme sovellettua tekniikkaa ja kytkemme aikareleen KT2 kelan rinnakkain kelan KM2 kanssa. Näin saadaan toinen ohjauskaavio (kuva 4, b). Yhdistämällä nämä kaksi piiriä (kuva 4, a ja b), saadaan yleinen ohjauskaavio (kuva 4, c).
Tarkastellaan nyt piirin toimintaa kokonaisuutena (kuva 4, c). Kun painat SB-käynnistyspainiketta, kontaktorin KM1 käämit ja aikarele KT1 vetävät ja tuote alkaa lämmetä.12 sekunnin kuluttua aikarele KT1 toimii ja sen koskettimet piirissä 1 avautuvat ja piirissä 2 sulkeutuvat. Tuote alkaa jäähtyä. Samanaikaisesti solenoidiventtiilin käämin KM2 kanssa aikarele K vetäytyy T2 laskee jäähdytysaikaa. Kun kosketin KT2.1 (piiri 3) avautuu, venttiili KM2 ja aikarele KT2 kytkeytyvät pois päältä ja piiri palaa alkuperäiseen asentoonsa.
Tuloksena oleva induktori- ja sprinkleriohjausjärjestelmä kehitettiin intuitiivisella menetelmällä. Ei kuitenkaan ole todisteita siitä, että tämä järjestelmä olisi oikea ja optimaalinen. Kysymys piirin toimivuudesta voidaan ratkaista vasta sen valmistuksen ja huolellisen kokeellisen tarkastuksen jälkeen. Tämä on juuri intuitiivisen menetelmän suurin haitta. Havaittu puute puuttuu analyysimenetelmästä. Ohjausjärjestelmien kehittämisen analyyttistä menetelmää käsitellään seuraavassa artikkelissa.