Moottorin ohjauspiirit nopeuden funktiona
 Moottoriohjauksessa nopeutta valvotaan moottorin roottorin nopeuden funktiona, jotta se vaikuttaa vastaaviin ohjauselementteihin sen muuttuessa.
Moottoriohjauksessa nopeutta valvotaan moottorin roottorin nopeuden funktiona, jotta se vaikuttaa vastaaviin ohjauselementteihin sen muuttuessa.
Moottorin käynnistyksen ohjauspiireissä voidaan käyttää nopeudensäätöreleitä tai pieniä mittavia sähkögeneraattoreita. Niitä käytetään kuitenkin erittäin harvoin näihin tarkoituksiin suunnittelun monimutkaisuuden, korkeiden kustannusten ja riittämättömän luotettavuuden vuoksi. Siksi moottorin nopeutta ohjataan epäsuorilla menetelmillä. Asynkronisissa ja synkronisissa moottoreissa pyörimistaajuutta ohjataan emf:llä ja roottorivirran taajuudella ja tasavirtamoottoreissa ankkuri emf:llä.
Kuvassa Kuvat 1, a ja b esittävät kaavioita rinnakkaisherätetyn tasavirtamoottorin automaattiselle käynnistykselle riippuen pyörimistaajuudesta sekä EMF:stä ja ankkurijännitteestä käynnistyshetkestä lähtien. Pyörimistaajuuden säätö suoritetaan mittaamalla moottorin EMF, joka vaihtelee suhteessa pyörimistaajuuteen.
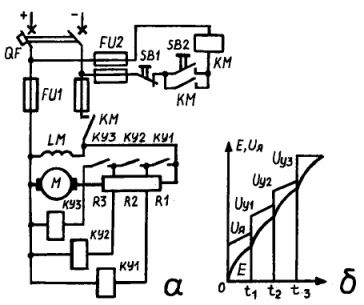
Riisi. 1.Ohjauspiirit nopeuden funktiona: a ja b — rinnakkaisherätetyn tasavirtamoottorin piiri- ja käynnistyskaavio
Koska EMF on verrannollinen moottorin nopeuteen, käynnistysreostaatin yksittäisten vaiheiden automaattinen syöttö suoritetaan tietyllä kiihdytyskontaktorien KM1, KM2 ja KMZ käyttöjännitteen suuruudella, joista jokainen on asetettu tiettyyn vetäytymiseen. arvo. Painamalla käynnistintä painikkeita SB2 käynnistää KM-linjakontaktorin. Kaikki vastukset R1, R2, R3 kytketään sarjaan ankkurikäämin kanssa ja rajoittavat virtaa.
Tietyllä nopeudella n1 kontaktorin K1 kelan jännite Uy1 on

missä Tässä Tämä on koneen kerroin.
Kun Uy1 on yhtä suuri kuin alasvetojännite, kontaktori KM1 toimii ja oikosulkee vastuksen R1. Pyörimisnopeuden lisäys n2:n ja n3:n pyörimiseen asti johtaa jännitteen nousuun kontaktorien K2 käämeissä ja oikosulkuun arvoihin


Tässä tapauksessa kontaktorit K2 ja oikosulku toimivat sarjassa ja oikosulkevat vastukset R2 ja R3. Resistanssin R3 oikosulun jälkeen käynnistysprosessi päättyy ja moottori voi käydä pitkään.
Induktiomoottorin roottoripiirin EMF on verrannollinen luistoon, eli E2s = E2s. Tässä E2 on kiinteän roottorin emf.
Mitä pienempi luisto, sitä pienempi EMF, eli sitä suurempi moottorin roottorin nopeus. Kierretyn roottorin vaihtovirtamoottoreiden käynnistyksen ohjaamiseen käytetään releitä, jotka ohjaavat EMF-arvoa roottoripiirissä.Vastaavat laitteet (releet, kontaktorit), jotka oikosulkevat käynnistysvastukset, on säädetty näihin jännitteisiin.
Käärittyjen roottorin oikosulkumoottorien ja synkronimoottoreiden ohjaukseen voidaan käyttää myös taajuusmenetelmää nopeuden funktiona. Tämä menetelmä perustuu roottorivirran f2 taajuuden tunnettuun riippuvuuteen staattorikentän n0 ja roottorin n2 pyörimistaajuudesta, ts.
Koska jokainen roottorin nopeus vastaa tiettyä f2-arvoa, tälle taajuudelle asetettu ja moottorin roottoripiiriin kytketty rele vaikuttaa kontaktorin kelapiiriin. Kontaktori oikosulkee vastusportaat tietyllä nopeudella.
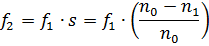
Jarrutus vastakkaisilla moottoreilla tapahtuu nopeuden mukaan nopeudensäätörele SR. Kuvassa 2 a, b esittävät esimerkkejä asynkronisten moottoreiden pysäyttämisestä oppositiolla.
Riisi. 2. Kaaviot asynkronisten moottoreiden pysäyttämiseksi opposition avulla: a — ei-käännettävissä; b - käännettävä
Katsotaanpa, kuinka nämä suunnitelmat toimivat.
Painamalla SB2-painiketta kytketään päälle kontaktorin KM käämi (katso kuva 2, a), joka sulkee tehokoskettimet ja lukitsee SB2-painikkeen. Samanaikaisesti jarrukontaktorin KM1 käämin piirissä olevan avauslohkon KM kosketin ja nopeudensäätörele SR katkaisee ne verkosta. Kun moottorin roottori saavuttaa tietyn nopeuden, SR-kosketin sulkeutuu, mutta tämä ei enää saa KM1-kontaktoria toimimaan. Moottori käy edelleen normaalisti.
Moottorin pysäyttäminen vastakytkentäjarrulla tapahtuu painamalla SB-painiketta.Samanaikaisesti kontaktorin KM käämi neutraloituu, ja sen pääkoskettimet katoavat ja irrottavat moottorin verkosta. KM:n avauskosketin KM1:n jarrukontaktoripiirissä sulkeutuu. Koska tällä hetkellä nopeudensäätöreleen SR kosketin on kiinni, jarrukontaktorin pääkoskettimet kytkeytyvät välittömästi päälle ja staattorin käämitys kytketään taaksepäin, magneettikenttä alkaa pyöriä vastakkaiseen suuntaan, ts. roottorin ja moottorin pyöriminen pysäytetään vastakytkimellä. Roottorin nopeus laskee ja tietyllä pienellä arvolla sen RKS-nopeudensäätöreleen koskettimet avautuvat ja irrottavat moottorin verkkovirrasta.
Peruutusohjauksessa vastakkaisella jarrutuksella (kuva 2, b) moottori käynnistetään eteenpäin painamalla painiketta SB1, joka sulkemalla kontaktorin KM1 käämin piirin varmistaa, että moottori on kytketty verkkoon. Moottorin roottori alkaa pyöriä ja kun se saavuttaa tietyn nopeuden, nopeudensäätöreleen sulkukosketin SR1 sulkeutuu ja avauskosketin SR2 avautuu.
Kontaktorin KM2 käämin päällekytkentä ei tapahdu, koska kontaktorin KM1 avauskosketin on katkaissut piirinsä. Tässä asennossa moottori jatkaa käyntiä, kunnes SB-painiketta painetaan. Kun SB-painiketta painetaan, käämin KM1 piiri kytkeytyy pois päältä. Tämä sulkee katkoskoskettimen KM1 ja kontaktorin KM2 kelapiiri saa virtaa.
Moottorin staattorin käämitys kytkeytyy taaksepäin. Kun roottori jatkaa pyörimistään samaan suuntaan hitausvoimasta, tapahtuu vastajarrutusta.Kun nopeus laskee tiettyyn pieneen arvoon, nopeudensäätörele avaa koskettimen SR1, kontaktori KM2 sammuu ja irrottaa moottorin verkosta.
Käynnistä moottori peruutettaessa painamalla SB2-painiketta. Koko prosessi on samanlainen kuin kuvattu. Nyt jarrukontaktorin roolia hoitaa KM1-kontaktori, ja nopeudensäätöreleen SR2-koskettimet ohjaavat jarrutusprosessia.
Synkronisen moottorin automaattiseen käynnistykseen liittyy tunnettuja vaikeuksia, koska tässä tapauksessa on välttämätöntä paitsi rajoittaa käynnistysvirtaa, myös synkronoida kone verkon kanssa.
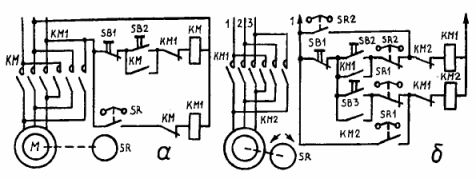
Pienitehoisen synkronisen moottorin ohjauspiiri on esitetty kuvassa. 3. Käynnistysvirran rajoitus saadaan aikaan staattorikäämitykseen sisältyvillä aktiivisilla vastuksilla. Ennen kuin käynnistät moottorin, kytke päälle AC- ja DC-verkkovirran automaattiset tulokytkimet QF ja QF1, jotka tarjoavat maksimaalisen ja lämpösuojan. Painamalla käynnistyspainiketta SB2 kontaktorin KM käämi kytketään päälle ja synkronisen moottorin staattorikäämitys KM:n pääkoskettimien kautta kytketään verkkoon käynnistysvastusten Rn kautta. Käämi on itselukittuva ja sen DC-piirissä oleva kosketin sisältää lukitusreleen KV, jonka sulkukosketin sulkeutuessaan valmistelee kontaktorien K1 ja K2 käämit päällekytkentää varten.
LM-roottorin herätepiirin taajuusreleet KF1 ja KF2 toimivat moottorin kierrosluvusta riippuen.Käynnistyksen yhteydessä, kun roottorin luisto on suurin, releiden KF1 ja KF2 katkaisukoskettimet avautuvat.Kelat avautuvat ennen kuin KV-estorele kytkeytyy päälle ja K1-käämi ei saa virtaa. Relekoskettimet KF1 ja KF2 sulkeutuvat uudelleen, kun moottorin kierrosluku saavuttaa noin 60-95 % synkronisesti relesäädön mukaisesti.
Releen KF1 koskettimien sulkemisen jälkeen kontaktorin K1 käämi kytkeytyy päälle, sen koskettimet pääpiirissä oikosulkevat käynnistysvastukset Rp ja staattori kytkeytyy täyteen verkkojännitteeseen. Kun releen KF2 avoimet koskettimet suljetaan, syntyy piiri syöttämään kontaktorin K2 käämiä kontaktorista K1 riippumatta, sen kosketin avautuu nopeudella, joka on noin 60 % synkronisesta nopeudesta.
Kontaktorissa K2 on kaksi käämiä: yksi pääkäämi, joka vetää KM1 ja toinen käämi KM2, joka on suunniteltu vapauttamaan kontaktorin mukana tuleva lukko. Ottokäämin KM1 päällekytkennän jälkeen sulkukoskettimet K2 sulkeutuvat herätepiirissä ja avauskoskettimet K2 avautuvat, jolloin roottorin käämitys irrotetaan purkausvastuksista R1 ja R2 ja roottori kytketään tasavirtaverkkoon.
Riisi. 3. Synkronisen moottorin ohjauskaavio
Kontaktorin K2 koskettimet toimivat seuraavassa järjestyksessä. N / O-kosketin K2 avautuu ottokäämin syöttöpiirissä, mutta estotoiminto pitää kontaktorin jännitteisenä. Sulkukoskettimet K2 sulkeutuvat kahden käämin syöttöpiirissä ja käämin KM2 piirissä valmistaen piirin myöhempää päällekytkentää varten. Kela K2 kytkeytyy jännitteettömäksi heti, kun lukitusmekanismi vapautetaan kelasta KM2. Moottori irrotetaan verkkovirrasta painamalla SB1-painiketta.Kela K1 vapauttaa avauskoskettimensa käämin KM2 piirissä, mikä vapauttaa salvan ja sammuttaa käämin KM1, minkä jälkeen piiri palaa alkuperäiseen asentoonsa.